










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería mecánica, tecnología y desarrollo
versión impresa ISSN 1665-7381
Ingenier. mecáni. tecnolog. desarroll vol.5 no.3 México sep. 2015
Artículos
Cinemática Diferencial de un Manipulador Paralelo Plano 3RRR-(RRR)v con Actuación Virtual Indirecta
Patricio Martínez-Zamudio1, Víctor J. González-Villela1 Marcelo López-Parra3, Alejandro C. Ramírez-Reivich2
1 Departamento de Ingeniería Mecatrónica. Facultad de Ingeniería, Universidad Nacional Autónoma de México, CU. pmz.rofi@gmail.com, vjgv@unam.mx
2 Centro de Diseño Mecánico e Innovación Tecnológica (CDMIT). Facultad de Ingeniería, Universidad Nacional Autónoma de México, CU. areivich@unam.mx
3 Centro de Alta Tecnología (CAT). Facultad de Ingeniería, Universidad Nacional Autónoma de México, CU. Correo electrónico: lopez@unam.mx
Fecha de recepción: 23-02-2015.
Fecha de aceptación: 13-04-2015.
Resumen
En este artículo, se presenta un enfoque nuevo para obtener el modelo de la cinemática diferencial, matriz jacobiana: por un lado, el modelo de un manipulador paralelo delta plano de configuración 3RRR-(RRR)v y por el otro, el modelo de su cadena virtual serial (RRR)v. Ambos modelos se presentan en variables de estado y en función de las variables articulares de la cadena virtual. El primer modelo facilita el análisis completo de ambos: la cinemática y la controlabilidad del robot delta plano con su cadena virtual. El segundo modelo se utiliza para obtener su cinemática inversa, para, retroalimentar al primero. Esta retroalimentación es llamada "actuación virtual indirecta". El enfoque propuesto garantiza que cuando el efector final de la cadena virtual serial (RRR)v es controlado alrededor de una trayectoria, el efector final del robot paralelo plano 3RRR también sigue dicha trayectoria; esto se debe a que comparten el mismo punto de análisis. Los resultados muestran que es posible controlar un robot paralelo delta plano 3RRR-(RRR)v a partir de controlar la cadena virtual (RRR)v. El método presentado aquí promete, por lo tanto, ser una herramienta útil para resolver robots complejos, como el caso de los robots manipuladores híbridos.
Palabras clave: Cinemática de robots, robots paralelos, cadenas virtuales, variables de estado, controlabilidad.
Abstract
This paper presents a new approach to obtain the model of the differential kinematics, on one hand, the model of a planar parallel delta manipulator 3RRR-(RRR)v in a single matrix array, on the other hand, the model of its serial virtual chain (RRR)v. Both models are shown in state variables and in function of the joint variables of the virtual chain. The first model is useful for the complete analysis of both: the kinematic and the controllability of the parallel manipulator. The second model is useful for obtaining its inverse kinematics that is later feed backed to the first one. This feedback is called "indirect virtual driving." Furthermore, this approach ensures that when the end effector of the serial virtual chain (RRR)v, is controlled about a trajectory, the end effector of the parallel manipulator 3RRR follows this trajectory as well, since they share the same point of analysis. The results show that it is possible to control a planar parallel delta manipulator 3RRR-(RRR)v through controlling the virtual chain (RRR)v . This method promises to be a tool for solving complex robots such as hybrid robot manipulators.
Keywords: Kinematics of robots, parallel robots, virtual chains, state variables, controllability.
Introducción
En robots paralelos, la cinemática inversa consiste en encontrarlas variables de las juntas activas y pasivas en función de las coordenadas del efector final del robot y puede ser utilizada para controlarla posición del efector final. El modelo cinemático de este tipo de robots tiene ecuaciones algebraicas con múltiples soluciones[1].
En la cinemática directa de robots paralelos el problema es determinar la posición del efector final en función de las juntas activas. En general, la solución a este problema no es única, de ahí que la cinemática ha sido objeto de una intensa investigación, por ejemplo, el trabajo reportado por Merlet[1]. Raghavan[2] muestra la solución de la cinemática directa de un manipulador paralelo resolviendo en función de un polinomio. Merlet[1], Tsai[3] y Ángeles[4] mostraron, de igual manera, que el problema de la cinemática directa es reducir las ecuaciones de posición a un polinomio en función de las variables activas. Sin embargo, la solución del polinomio no asegura la correcta evolución de las variables de las juntas activas y no considera a las juntas pasivas, al ejecutar una tarea dada. Por otro lado, no hay algoritmo conocido que permita la fácil determinación de una postura única para la plataforma móvil[1].
Es importante hacer hincapié en el problema del resultado de la cinemática directa por polinomio. El cálculo puede implicar un gran número de operaciones y por lo tanto puede ser muy sensible a errores numéricos de redondeo; por esta razón la comprobación de la validez de las soluciones con la cinemática inversa es normalmente necesaria[3].
Un problema para los métodos numéricos rápidos es que incluso el más rápido es todavía lento para su uso en tiempo real, por ejemplo, para fines de control[4]. Entre los trabajos pioneros publicados que han tratado de resolver éste problema se puede citar a Waldron (1966)[5], quien estudió el movimiento instantáneo por teoría de tornillos en cadenas cinemáticas cerradas, asimismo, se han propuesto otros métodos de análisis[6-8]. La cinemática diferencial de manipuladores paralelos se complica por la existencia de numerosas cadenas cinemáticas cerradas; recientemente, Mohamed[9], asimismo, Mohamed y Duffy[10] propusieron la aplicación de la teoría de tornillos recíprocos y Sugimoto[11] a su vez, propuso la utilización del álgebra de motor para el análisis del jacobiano de manipuladores paralelos.
La solución de la cinemática directa e inversa, utilizando la integración de la cinemática diferencial, es particularmente importante para los manipuladores de cadenas cinemáticas cerradas cuyas soluciones no existen, son difíciles de obtener, o son demasiado complejas para ser tratadas; el trabajo de Campos, A., R. Guenther, and D. Martins[12], sobre robots redundantes o paralelos, constituye un buen ejemplo de esto.
Chung[13] aborda la cinemática de robots manipuladores seriales redundantes planos, utilizando cadenas virtuales y subcadenas virtuales, para resolver el problema de la cinemática inversa. Chung define a un eslabón virtual como un enlace ficticio que conecta a dos articulaciones. Las ventajas son que reduce la carga de cómputo y logra la manipulación a nivel general mediante la obtención óptima de los ángulos. Entre las desventajas que presenta esta estrategia de análisis se puede mencionar que sólo se aplican a robots seriales planos, es complicado utilizar el método en manipuladores paralelos y tampoco se consideran las velocidades lineales y angulares del robot.
Toshio[14] describe al brazo virtual como un manipulador que tiene la misma estructura cinemática de un manipulador real. Su teoría se basa en un sistema que denomina distribuido y que es la representación de la cinemática del manipulador. Así mismo, utiliza la propagación hacia atrás de redes neuronales. Entre las ventajas del método se pueden mencionar varias; cada subsistema puede trabajar totalmente autónomo, el movimiento de la articulación del manipulador redundante se puede calcular de una manera paralela y distribuida y la redundancia cinemática del manipulador puede ser utilizada positivamente usando sub-brazos virtuales. Algunas desventajas del modelo propuesto por Toshio son que sólo se puede utilizar en robots seriales redundantes planos, asimismo, no toma en cuenta las velocidades lineales y angulares del robot.
Para el caso de la síntesis de mecanismos paralelos se utilizan y definen cadenas virtuales seriales y cadenas virtuales paralelas[15], las cuales se desarrollan sobre la base de la teoría de tornillos. En este caso, cada cadena virtual es propuesta por un análisis exhaustivo de sistemas recíprocos de tornillos[16-19].Las cadenas virtuales paralelas constituye un tema de investigación que no ha sido resuelto en su totalidad[20].Una de las ventajas de aplicar la teoría de tornillos es que se obtienen nuevas estructuras de mecanismos paralelos con ayuda de las cadenas virtuales que define el mismo analista. Entre las desventajas se tiene que sólo se aplica para la obtención de nuevas configuraciones de robots paralelos, no se realiza el modelado de la cinemática directa, inversa y no se obtiene la matriz jacobiana.
Por otro lado, como parte del tema de cadenas virtuales, se definen también las cadenas virtuales de Assur y sus aplicaciones en la cinemática diferencial de robots paralelos [12]. Las cadenas virtuales de Assur son útiles para la obtención de información sobre los movimientos relativos o también para imponer restricciones cinemáticas particulares entre dos eslabones de una cadena cinemática. Entre las ventajas que se pueden mencionar están el hecho de que el método utiliza la cinemática diferencial y el mismo eslabón virtual se utiliza para restringir el movimiento. Asimismo, se pueden definir eslabones virtuales en el plano y en el espacio cartesiano. Una de las desventajas de este método radica en que aún considerando el eslabón virtual no se obtiene una matriz jacobiana que considere a las juntas pasivas de robot. Al final se llega a una matriz jacobiana similar a la presentada por Gosselin, C. and J. Angeles[21], donde solo se contemplan juntas activas y no se presentan resultados de simulación para validar los resultados.
En este artículo se presenta un enfoque novedoso para obtener el modelado de la cinemática diferencial de un robot manipulador paralelo 3RRR plano en función de una cadena virtual. Se propone un método para obtener la representación cinemática, en el espacio de estados, de un robot paralelo 3RRR-(RRR)v , para actuarlo indirectamente por medio de su manipulador virtual (RRR)v , el cual sigue una trayectoria predefinida.
El trabajo se desarrolla presentando los temas de la siguiente manera: Postura del robot, Cinemática diferencial de un manipulador 3RRR-(RRR)v, Cadena virtual de un manipulador (RRR), Modelo cinemático de un manipulador 3RRR-(RRR)v, Resultados, Conclusiones.
Postura del Robot
Se considera un robot paralelo plano cuya plataforma móvil, tiene tres grados de libertad, de los cuales, dos son a lo largo de los ejes x e y, y el tercero es una rotación θ alrededor del eje z.
La Fig. 1, muestra el robot en estudio, con sus tres cadenas cinemáticas independientes, accionadas cada una por un actuador. Como cada una de estas cadenas debe estar ligada, por un lado, a la tierra y por el otro, a la plataforma móvil al mismo tiempo, entonces hay tres puntos de anclaje al suelo y tres puntos de unión a la plataforma móvil.

La Figura 1, muestra la postura del robot paralelo plano 3RRR y se puede describir, como sigue:

Donde, la coordenada (x, y) describe la posición del punto P con respecto al sistema inercial {x,y} y donde θ=θp, es la orientación del manipulador, medida desde el sistema absoluto al sistema local Además, es el vector postura de velocidades del vector. Sea, el vector postura de velocidades del vector, expresado en el sistema local, entonces:


Donde:

Cinématica Diferencial del Manipulador 3RRR-(RRR)v
La cinemática diferencial del manipulador 3RRR-(RRR)v, se obtiene a partir de darle solución a las restricciones cinemáticas que estén en función de las variables generalizadas de velocidad y que son seleccionadas de entre el conjunto de sus variables de configuración de velocidad.
A. Restricciones cinemáticas del manipulador.
Para obtener las restricciones cinemáticas del manipulador se utiliza el método de propagación de velocidades, mostrado en [22, 23], partiendo del punto P de la plataforma móvil hasta llegar al inicio de cada cadena (ver Fig. 1).
Una vez que se tienen las restricciones cinemáticas de velocidad de cada cadena, la cinemática diferencial del manipulador paralelo puede ser expresada en el sistema inercial por el sistema de ecuaciones diferenciales de la siguiente forma:

Donde, ATp (q)∈R(M·N)x(3+M·N) es la matriz asociada a la cinemática en el sistema inercial, q∈R3+M·N es el vector de las coordenadas de configuración y  ∈R3+M·N es el vector de las velocidades de configuración, donde M es el número de cadenas y V es el número de actuadores por cadena, siendo:
∈R3+M·N es el vector de las velocidades de configuración, donde M es el número de cadenas y V es el número de actuadores por cadena, siendo:


Para el manipulador 3RRR se tiene que qnm describe la coordenada de configuración de la cadena n de la junta m, donde, m 1,..., M; n 1,..., N; M=3 y N=3.
Por otro lado, si θ=0, es posible encontrar la cinemática diferencial interna del manipulador, de la siguiente forma:

El hecho de que sea interna, se refiere a que está referenciada al sistema local {xP, yP}.
Donde ATp(q)∈R(M·N)x(3+M·N)es la matriz asociada a la cinemática del manipulador expresada en el sistema local {xp, yp}. El vector qp representa al vector de las velocidades de configuración con respecto al sistema local {xp, yp} siendo:

B. Cinemática en variables de estado
Considerando que se tiene un robot paralelo plano de 3GDL, para solucionar el conjunto de ecuaciones diferenciales Ecuación 1.8, es conveniente seleccionar el conjunto de variables generalizadas que mejor convenga, para representar al sistema en variables de estado. Un caso pueden ser las variables de velocidad del punto P expresadas en coordenadas locales: vxP y vyP, así como la velocidad angular ωP, del efector final, por lo que la solución a la ecuación, puede expresarse de la forma:

Donde Stn son vectores columna y η=[vxP vyp ωp]T es el vector de entradas. Por lo tanto:

De esta forma se tiene la cinemática interna del robot paralelo expresada en términos de las variables de entrada η.

Para expresar a la Ecuación 1.12 en el sistema inercial {x, y}, se utiliza la matriz de rotación de postura del sistema {xp, yp} al sistema {x, y}.
Se introduce la matriz de configuración de rotación Rq, como una extensión de la matriz 0RP(θP).
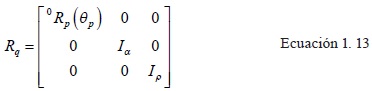
Donde Rq∈R(3+α+ρ)x(3+α+ρ), es una matriz identidad relacionada con las juntas activas, Iα∈Rαxα y Iρ es una matriz identidad relacionada con las juntas pasivas, Iρ∈Rρxρ.
Premultiplicando ambos lados por la Ecuación 1.12 de la matriz de rotación Rq se tiene:

El modelo cinemático del manipulador 3RRR-(RRR)v, representado en el espacio de estados q=St(q)u, se puede escribir de la siguiente forma:
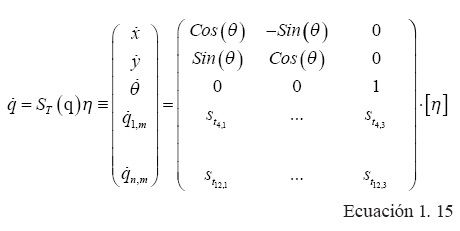
La Ecuación 1.15 expresa las velocidades generalizadas del manipulador 3RRR-(RRR)v en términos de las variables de entrada η, con respecto al sistema inercial {x,y}.
Análisis del álgebra de control de Lie
Utilizando la explicación que da [23] y el tutorial para la aplicación del álgebra de Lie para robots móviles[24], se aplicó el método para analizar la controlabilidad del sistema. Para ello se utiliza la matriz ST(q), que se obtiene de la Ecuación 1.16. Donde cada columna se nombrará como un vector. Por ello:

Después se analiza la controlabilidad mediante la obtención del corchete de Lie[24], que corresponde a la expresión:

Donde [f,g](q) es el corchete de Lie; f y g son vectores columna STpi elegidos arbitrariamente.
El método consiste en obtener el corchete de Lie para todas las parejas de vectores columna de la matriz ST(q) y cada que se obtiene uno, agregarlo a la matriz ST(q); posteriormente se comprueba si la nueva columna agregada es linealmente independiente de las anteriores. De ser así, se mantiene la matriz extendida y dicha columna también se considera para el análisis de la independencia lineal de los corchetes de Lie subsecuentes; si no es linealmente independiente, se desecha y se prueba con otro par de columnas.
Es claro que conforme aumenta el tamaño de la matriz, también aumentan la cantidad de pares de columnas posibles para probar.
Como [f,g](q)=-[g,f](q) por lo que invertir las columnas resultaría en un corchete de Lie linealmente dependiente.
Una vez que ya no se obtienen más columnas linealmente independientes, el rango de la matriz extendida determina cuántas variables son controlables. Para comprobar la independencia lineal del nuevo elemento, se hace uso de la siguiente ecuación:

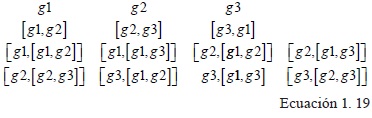
Si existe una solución para k1,...,kn, entonces el corchete de Lie es linealmente dependiente. Se realiza el método hasta que no queda ningún par de vectores columna por probar y termina el proceso iterativo de los corchetes de Lie. Una base para el álgebra de Lie, propuesta por [25] para tres vectores generada por g1, g2, g3 es:
Para este caso de estudio, se comprobó que, la matriz ST(q) no tiene más columnas nuevas linealmente independientes, derivadas del análisis del álgebra de Lie. Como el rango de la matriz ST(q) determina el número de variables que son controlables, sólo tres de estas se pueden llevar una posición deseada[23, 24].
CADENA VIRTUAL (RRR)v
Definición
En este trabajo se define a la cadena virtual como un elemento que existe en la cinemática del manipulador pero no en la dinámica de este. Debido a que la masa de los eslabones de la cadena virtual es considerada cero, los efectos inerciales en el modelo dinámico son nulos, existiendo matemáticamente en el modelo cinemático, pero no en el dinámico. Esto se puede interpretar que no existe físicamente.
Para seleccionar la cadena virtual del robot paralelo 3RRR, se siguieron los siguientes pasos: primero, se obtiene el modelo en variables de estado del robot paralelo 3RRR, aplicando las Ecuaciones 1.5 a 1.15. Posteriormente, se recurre al análisis de controlabilidad, aplicando las Ecuaciones 1.17 a 1.19.
Una vez conocidas el número de variables con las que se puede controlar al sistema, se pueden utilizar alguna de las cadenas virtuales seriales definidas en la síntesis de tipo [20] o definir las propias. La Tabla I y la Fig. 2 muestra cadenas virtuales que están formadas por juntas rotacionales y prismáticas de 3GDL.
Cadenas equivalentes:


Las coordenadas generalizadas virtuales son:


Una vez definida la cadena virtual a utilizar se emplea la Ecuación 1.5 hasta llegar a la Ecuación 1.15, para obtener la representación en variables de estado de la cadena virtual (RRR)v, teniendo como salida (xv,yv,θv,v1v2,v3) y como entradas las variables de velocidad del efector final de la cadena virtual vxpv y vypv), así como la velocidad angular ωv.

Una vez que se tiene la representación en variables de estado de la cadena virtual, ver Ecuación 1.22, se toman sólo las variables articulares virtuales de la salida obteniendo la Ecuación 1.23, que representa a la sub-matriz de la cadena virtual.

Por lo que se puede representar por:

Modelado cinemático del manipulador 3RRR-(RRR)v
En la Fig. 3, muestra el sistemas de coordenadas para describir el desplazamiento del efector final del manipulador 3RRR-(RRR)v en el sistema inercial, así como de los elementos internos que representan el movimiento relativo entre ellos.
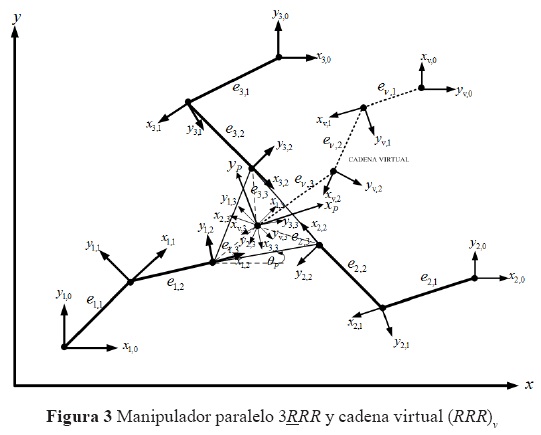
Se emplea la Ecuación 1.5 hasta llegar a la Ecuación 1.15 para obtener la representación en variables de estado del manipulador 3RRR-(RRR)v que se resuelve en función de las vari.ables de la cadena virtual (RRR)v. Las salidas son (xv, yv,θv 11, 12...33), donde se contemplan la velocidad lineal y angular de la plataforma en función de la cadena virtual, las juntas activas, pasivas y como entradas las variables articulares virtuales (v1, v2 v3).
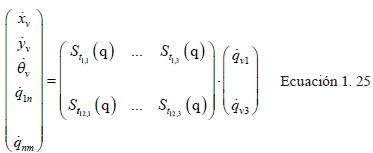
La Ecuación 1.25 queda definida como:

Una vez que se obtiene la expresión para la cadena (RRR)v utilizando la Ecuación 1.24 para el manipulador 3RRR-(RRR)v se sustituye en la Ecuación 1.26.

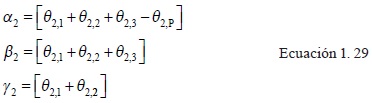
Restricciones cinemáticas de una cadena del manipulador 3RRR-(RRR)v
Debido a que la cadena virtual es semejante a las cadenas del robot paralelo el análisis es similar y con solo realizar el modelado de una cadena se pueden tener las demás [23, 24]. Se toma una cadena cinemática del robot paralelo (ver Fig. 4) para realizar el análisis, quedando de la siguiente forma:
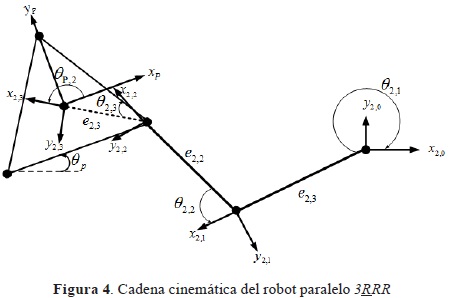
El sistema {xij, yij} situado en el punto Pij representa al sistema de coordenadas del j-ésimo eslabón, de la i-ésima junta rotacional del manipulador.
Además, el ángulo θp, corresponde a la orientación de los ejes coordenados (xp, yp) con respecto al sistema inercial.
El ángulo θij hace referencia a la orientación de los ejes coordenados (xij, yij) con respecto al sistema de la plataforma y de los eslabones encadenados.
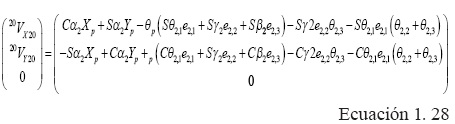
Donde:
El robot paralelo delta plano del tipo 3RRR, está formado por cadenas cinemáticas idénticas, por lo tanto con solo obtener la solución para una cadena se repite el análisis para las otras dos cadenas junto con la cadena virtual.
Teniendo la matriz para las tres cadenas cinemáticas del robot paralelo Ecuación 1.30 y con la cadena virtual se tiene:

Representación en variables de estado.
Utilizando la Ecuación 1.31 para resolver el sistema en variables d estado en función de las coordenadas articulares virtuales ηv=  v1, v2, v3 se tiene:
v1, v2, v3 se tiene:

De esta forma se tiene la cinemática interna de la plataforma expresada en términos de las variables de entrada, por lo que para referenciarla al sistema inercial , se aplica una rotación. Para esto definimos la matriz de rotación de postura del sistema local {xp, yp} al sistema inercial {x, y}.
Por lo tanto, multiplicando al sistema por la matriz de rotación la Ecuación 1.13, se tiene la siguiente expresión:

Aplicando la transformación se tiene:

Análisis de la cadena virtual (RRR)v
Haciendo un análisis similar al que se realiza para llegar a la Ecuación 1.28, se utiliza para la cadena virtual.

Expresado de la forma AT (q)=0

Se obtiene la representación en el espacio de estados de la cadena virtual (RRR)v a partir de la expresión.

Se toma la sub-cadena de las variables articulares virtuales

Análisis de controlabilidad del manipulador 3RRR-(RRR)v.
Se analiza la controlabilidad de la Ecuación 1.34 mediante la obtención del corchete de Lie, que corresponde a la Ecuación 1.18. Una vez que no se obtienen más columnas linealmente independientes, el rango de la matriz extendida determina cuántas variables son controlables. Para comprobar la independencia lineal del nuevo elemento, se hace uso de la Ecuación 1.19.
Se resuelve para el manipulador 3RRR-(RRR)v utilizando el corchete de Lie y la base para el álgebra de Lie[25]. Para obtener X4; f = X1 y g = X2

Para obtener X5; f = X2 y g = X3
Para obtener X6; f = X3 y g = X, y así sucesivamente,
La Tabla 2 muestra los resultados de este análisis.

Se concluye que el manipulador 3RRR-(RRR)v es de 3GDL y al agregar un eslabón virtual de 3GDL, no presenta vectores linealmente independientes adicionales al aplicarle el álgebra de Lie. Por lo que el sistema, aunque se le agregó el eslabón virtual, sigue siendo de 3GDL y puede ser controlado por tres variables cualesquiera del vector de coordenadas de configuración en velocidad, incluyendo a las virtuales.
Al introducir un eslabón virtual las nueve variables, quedan dependientes al eslabón virtual. Pasando de ser nueve a doce variables  , son las coordenadas de configuración. Para el caso del manipulador paralelo del tipo 3RRR, internamente pueden ser actuados tres o incluso un eslabón y quedar en función de los demás.
, son las coordenadas de configuración. Para el caso del manipulador paralelo del tipo 3RRR, internamente pueden ser actuados tres o incluso un eslabón y quedar en función de los demás.
La representación en variables de estado queda en función de las entradas de los parámetros de la cadena virtual para así poder controlar al manipulador paralelo.
Resultados
Se obtiene la representación en el espacio de estados del manipulador 3RRR-(RRR)v, ver Ecuación 1.34 donde se contemplan las juntas activas y pasivas en función de las variables virtuales.
Así mismo, la actuación del robot paralelo delta plano 3RRR se hace a través de una actuación virtual indirecta. Esto se logra retroalimentando al modelo en variables de estado del robot paralelo 3RRR, con el modelo en variables de estado de la cadena virtual (RRR)v, ver Ecuación 1.34.
Los experimentos realizados fueron pensados para la apreciación visual de las propiedades del manipulador 3RRR-(RRR)v en función de la cadena virtual (RRR)v.
Movimiento Sinusoidal del punto de análisis
Se realiza un movimiento sinusoidal del punto P de análisis con respecto al sistema inercial {x, y}. Este movimiento permite observar cómo la velocidad lineal puede cambiar sin alterar la orientación de la plataforma móvil. Para ello se introducen perfiles sinusoidales de velocidad a la entrada, uno desfasado 90° del otro. La velocidad angular se mantiene nula.
Simulación de la cadena virtual (RRR)v.
En la Fig. 5 se observa la simulación de la cadena virtual. Los parámetros de entrada para la cinemática diferencial inversa de la cadena virtual son:

El la Fig. 6 se muestran las gráficas de la evolución de las coordenadas generalizadas de la cadena virtual en el seguimiento de una trayectoria.

Simulación del manipulador paralelo en función de las variables virtuales.
Una vez que se tienen las velocidades angulares virtuales estas se introducen en la Ecuación 1.32.
En la Fig. 7 se muestra cada bloque que contiene la información de la cadena virtual y del manipulador 3RRR-(RRR)v.

Se obtiene la representación en el espacio de estados en función de las variables virtuales como entradas. En la Fig. 8 se observa el resultado de la simulación del robot paralelo 3RRR, teniendo como las entradas las variables articulares virtuales (RRR) .

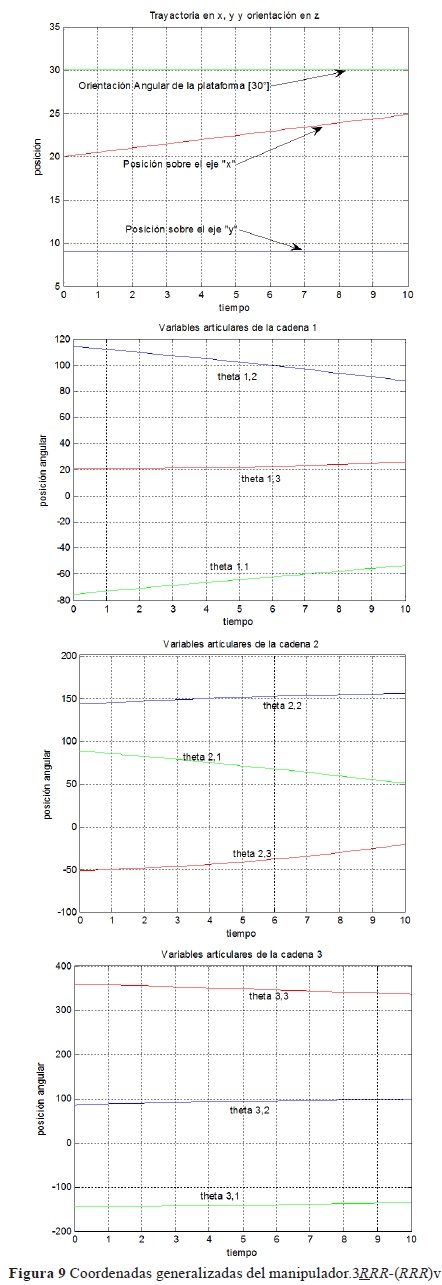
En la Fig. 9 se muestran las gráficas de la evolución de las coordenadas generalizadas del robot paralelo 3RRR, en función de la cadena virtual (RRR)v.
Conclusiones
En este trabajo se obtiene por primera vez dos modelos cinemáticos, en variables de estado, de: 1) de un manipulador 3RRR-(RRR)v y 2) de un manipulador serial virtual (RRR)v. Cada modelo toma en cuenta todas sus variables de configuración y queda representado por una sola matriz jacobiana. Lo anterior permite que cuando el efector final del manipulador virtual (RRR)v sea controlado alrededor de una trayectoria, este pueda proporcionar una actuación virtual indirecta al modelo del manipulador 3RRR-(RRR)v, para controlar este último utilizando parte de la cinemática inversa del primero.
Utilizando el álgebra de Lie, sobre el modelo cinemático del manipulador 3RRR-(RRR)v y sobre el modelo cinemático inverso de la cadena virtual (RRR)v, fue posible hacer el análisis de controlabilidad, dando como resultado que el análisis proporciona la movilidad de cada uno de ellos.
A diferencia de otros trabajos, el modelo en variables de estado del manipulador 3RRR-(RRR)v presentado en este trabajo incluye: las variables articulares activas, pasivas y del espacio de trabajo. Por otro lado, los trabajos anteriores a este, buscan la solución sólo para las variables activas, ajustando un polinomio para modelarla evolución de estas. Con la matriz en variables de estado del manipulador 3RRR-(RRR)v es posible conocer la evolución de todas las juntas activas y pasivas.
Otro problema que establece la literatura es la validación del resultado de la cinemática directa por polinomios. El cálculo puede implicar un gran número de operaciones y por lo tanto puede ser muy sensible a errores numéricos de redondeo, por lo que la comprobación de la validez de las soluciones, con la cinemática inversa puede ser necesaria. Con el modelo en variables de estado del manipulador 3RRR-(RRR)v es posible conocer la velocidad lineal y la angular del efector final del manipulador paralelo en función de las velocidades angulares de la cadena virtual del manipulador (RRR)v.
La matriz jacobiana que se obtiene del modelo en variables de estado para los dos manipuladores es diferente a la que se presenta en la literatura. Además, para el manipulador paralelo, los modelos actuales representan la cinemática diferencial de estos manipuladores con dos matrices, una para la cinemática diferencial directa y otra para la cinemática diferencial inversa.
Más importante, este trabajo muestra un nuevo enfoque en el análisis de la cinemática de los robots manipuladores serie y paralelo, al utilizar, por un lado, sus modelos en variables de estado y, por el otro, en función de su cadena virtual. Esto último promete ser una herramienta novedosa para resolver manipuladores paralelos complejos, como el caso de robots manipuladores paralelos redundantes o híbridos. Queda como trabajo a futuro la propuesta de un esquema de control para el manipulador.
Agradecimientos
El autor principal agradece a CONACYT, por su apoyo al Programa de Maestría y Doctorado en Ingeniería de la UNAM.
Los autores agradecen también el apoyo brindado,para la realización de este trabajo, a la DGAPA, UNAM, a través del proyecto PAPIIT IN115811 y PAPIIT IN117614, con títulos: "Investigación y desarrollo en sistemas mecatrónicos: robótica móvil, robótica paralela, robótica híbrida y teleoperación" y "Robótica intuitiva, adaptable, reactiva, híbrida y móvil aplicada al servicio, el rescate y la medicina", respectivamente.
Referencias
1. Merlet, J.P., Parallel Robots 2006: Springer. [ Links ]
2. Raghavan, M., Stewart platform of general geometry has 40 configurations. Journal of Mechanical Design, Transactions of the ASME, 1993. 115(2): p. 277-280. [ Links ]
3. Tsai, L.W., Robot Analysis: The Mechanics of Serial and Parallel Manipulators 1999: Wiley. [ Links ]
4. Angeles, J., Fundamentals of Robotic Mechanical Systems. Theory, Methods and Algorithms. Second Edition ed, ed. F. F. Ling2002:Springer. [ Links ]
5. Waldron, K.J., The constraint analysis of mechanisms. Journal of Mechanisms, 1966. 1(2): p. 101-114. [ Links ]
6. Davies, T., Mechanical networks—I Passivity and redundancy. Mechanism and Machine Theory, 1983. 18(2): p. 95-101. [ Links ]
7. Davies, T. and E.J. Primrose, An algebra for the screw systems of pairs of bodies in a kinematic chain. Proc. Third World Congress Theory Mach. and Mech, 1971. [ Links ]
8. Davies, T.H., Kirchhoff's circulation law applied to multi-loop kinematic chains. Mechanism and Machine Theory, 1981. 16(3): p. 171-183. [ Links ]
9. Mohamed, M.G., J. Sanger, and J. Duffy. INSTANTANEOUS KINEMATICS OF FULLY-PARALLEL DEVICES. in Proceedings of the Sixth World Congress on the Theory of Machines and Mechanisms. 1984. New Delhi, Ind: Halsted Press. [ Links ]
10. Mohamed, M.G. and J. Duffy, DIRECT DETERMINATION OF THE INSTANTANEOUS KINEMATICS OF FULLY PARALLEL ROBOT MANIPULATORS. Journal of mechanisms, transmissions, and automation in design, 1985. 107(2): p. 226-229. [ Links ]
11. Sugimoto, K., KINEMATIC AND DYNAMIC ANALYSIS OF PARALLEL MANIPULATORS BY MEANS OF MOTOR ALGEBRA. Journal of mechanisms, transmissions, and automation in design, 1987. 109(1): p. 3-7. [ Links ]
12. Campos, A., R. Guenther, and D. Martins, Differential kinematics of serial manipulators using virtual chains. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2005. 27(4): p. 345-356. [ Links ]
13. Chung, W.J., W.K. Chung, and Y. Youm. Inverse kinematics of planar redundant manipulators using virtual link and displacement distribution schemes. 1991. Sacramento, CA, USA: Publ by IEEE. [ Links ]
14. Tsuji, T., et al., Instantaneous inverse kinematic solution for redundant manipulators based on virtual arms and its application to winding control. JSME International Journal, Series C: Dynamics, Control, Robotics, Design and Manufacturing, 1995. 38(1): p. 87-93. [ Links ]
15. Gogu, G., Structural Synthesis of Parallel Robots 2012: Springer London, Limited. [ Links ]
16. Kong, X. and C.M. Gosselin, Type Synthesis of 3-DOF Spherical Parallel Manipulators Based on Screw Theory. Journal of Mechanical Design, 2004. 126(1): p. 101-108. [ Links ]
17. Kong, X. and C.M. Gosselin, Type synthesis of 5-DOF parallel manipulators based on screw theory. Journal of Robotic Systems, 2005. 22(10): p. 535-547. [ Links ]
18. Kong, X. and C.M. Gosselin, Type Synthesis of 3-DOF PPR-Equivalent Parallel Manipulators Based on Screw Theory and the Concept of Virtual Chain. Journal of Mechanical Design, 2005. 127(6): p. 1113-1121. [ Links ]
19. Kong, X., C.M. Gosselin, and P.-L. Richard, Type synthesis of parallel mechanisms with multiple operation modes. Journal of Mechanical Design, Transactions of the ASME, 2007. 129(Compendex): p. 595-601. [ Links ]
20. Kong, X. and C.M. Gosselin, Type Synthesis of Parallel Mechanisms 2007: Springer-Verlag Berlin Heidelberg. [ Links ]
21. Gosselin, C. and J. Angeles, Singularity analysis of clossed-loop kinematic chains. Robotics and Automation, IEEE Transactions on, 1990. 6(3): p. 281-290. [ Links ]
22. Craig, J.J., Robótica 2006: Pearson Educación de México. [ Links ]
23. Gonzalez-Villela, V.J., Research on a semiautonomous mobile robot for loosely structured environments focused on transporting mail trolleys, 2006. [ Links ]
24. Coelho, P. and U. Nunes, Lie algebra application to mobile robot control: A tutorial. Robotica, 2003. 21(5): p. 483-493. [ Links ]
25. Murray, R.M. and S.S. Sastry, A mathematical introduction to robotic manipulation 1994: CRC PressINC. [ Links ]

