











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
Desde su creación en el siglo VI, el ajedrez ha evolucionado cambiando la forma de las piezas, además de los movimientos de cada una, pero sigue siendo un juego muy analítico (Fairy, 2015), debido a esto, el jugarlo presenta bastantes beneficios que varían dependiendo de la edad del jugador (Gobet & Campitelli, 2005; Kelly et al., 1985; Machado, 2011; Pita, 2015). Ya que para jugar se requiere de las manos, las personas que padecen deficiencia motriz les resulta complicado acceder a aquéllos beneficios.
Por lo general, para que dichas personas puedan jugar ajedrez recurren a juegos por computadora, donde gracias a un micrófono, un ordenador y un software especial detectan los comandos de voz del jugador para que así no necesite de las manos al realizar una partida de ajedrez, lamentablemente el estar frente a la pantalla del ordenador provoca fatiga visual, causando un daño a la salud (Acuña & Rúa 1988; Rombouts, 2015; Fonseca, 2006).
Por otro lado, debido a la pandemia causada por el COVID-19 resulta poco conveniente permanecer mucho tiempo frente a una persona con la cual no se convive, lo que causa que las partidas de juegos de mesa como el ajedrez no sean propicias, ya que se debe respetar el distanciamiento social (“Orientaciones para el público,” n.d.).
Por todo ello, para que los beneficios del jugar ajedrez puedan estar aún al alcance de todos, el objetivo general de este trabajo es diseñar y producir un prototipo alpha de un tablero de ajedrez, en el cual los trebejos se desplacen a través de comandos de voz, en adelante TACOVO, eliminando la necesidad de que el usuario deba manipularlos directamente. Dichos comandos de voz serán procesados por una aplicación móvil que se instalará en un Smartphone, el cual estará conectado con el tablero por Bluetooth, además, esta aplicación brindará la opción de conectarse con otro jugador que posea un tablero similar para así jugar remotamente. Con este diseño se obtendrá la experiencia necesaria para poder continuar con la mejora del prototipo.
Los objetivos particulares son: que el diseño del tablero sea compacto, que la aplicación móvil sea de fácil utilización, que el tablero no posea partes mecánicas móviles visibles para el jugador, que el costo de fabricación no sea superior a $ 200, que su alimentación no supere los 12 VDC y 2 A, que los componentes que lo conforman sean fáciles de obtener, que la parte mecánica requiera un mantenimiento poco frecuente, que su conectividad inalámbrica sea muy simple y que el panel del tablero de ajedrez ocupe casi toda la parte superior del prototipo.
El contenido de este trabajo se distribuye de la siguiente manera: la primera sección describe el prototipo en general, la segunda detalla el diseño mecánico, la tercera muestra el diagrama de bloques del movimiento del efector final y del flujo de la programación, donde se describen a los componentes y circuitos electrónicos, la cuarta describe las pantallas de la aplicación móvil, después se muestra la implementación y los resultados experimentales, finalmente las conclusiones del artículo.
Descripción del prototipo
El prototipo del TACOVO está compuesto por los siguientes subsistemas:
Estructura mecánica.
Estructura del procesamiento de la información.
Estructura electrónica.
Aplicación móvil.
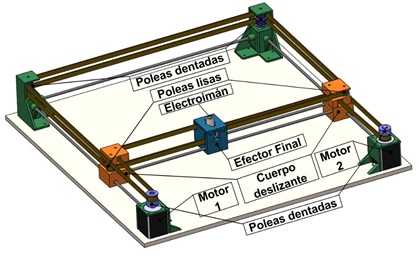
Mecánicamente el TACOVO está formado por un manipulador cartesiano con un mecanismo Core-XY, el cual desplaza a los trebejos por todo el tablero. El sistema Core-XY mostrado en la Figura 1 está formado por 10 poleas de distribución (2 poleas motrices y 8 poleas pasivas), 2 fajas dentadas de extremo abierto, 3 rieles (2 en paralelo y 2 perpendicular a estos), una estructura móvil que contiene a los rieles perpendiculares donde se desplaza el efector final y 2 poleas en cada extremo puestas en diagonal una sobre otra, así como una estructura fija que contiene en cada extremo alejado 2 poleas pasivas, una sobre otra, a los rieles en paralelo, y en los extremos cercanos a los motores paso a paso, cada uno con su polea motriz. Cada trebejo presenta un imán de neodimio al centro de su base y el efector final presenta un electroimán que al activarse se acopla con el imán de neodimio de los trebejos y los desplaza por el tablero.
La estructura del procesamiento de la información lo conforma la unidad de control que está integrada por el microcontrolador, el cual se encarga de controlar y analizar el movimiento de los trebejos.
Electrónicamente el TACOVO está formado por componentes, módulos y sensores de fácil reemplazo. Los componentes y módulos están integrados dentro de una PCB, que se localiza entre ambos motores, sin interferir con el movimiento del efector final, y los sensores son los encargados de detectar si el efector final se encuentra en el punto de calibración del efector con el tablero.
La aplicación móvil funciona de interfaz hombre máquina, esta permite al usuario mencionar el movimiento que hará el trebejo en la partida para que luego el trebejo se desplace por el tablero automáticamente.
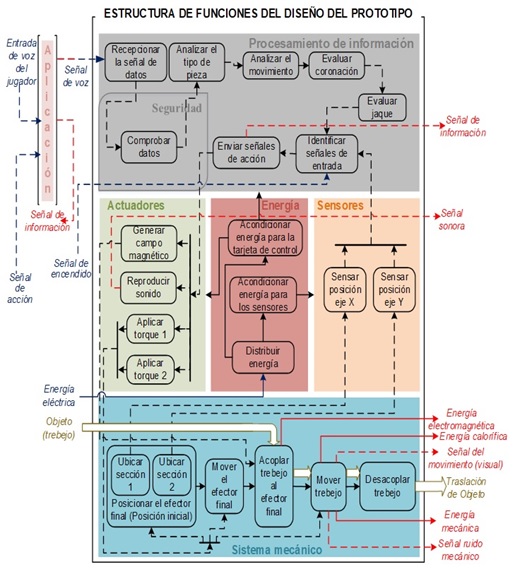
Según la metodología VDI-2206 la estructura básica del sistema mecatrónico del prototipo está determinado como se muestra en la Figura 2. Para realizar un análisis más minucioso de la estructura básica del sistema es conveniente realizar la estructura de funciones integrada, la cual se aprecia en la Figura 3. Asimismo, la Figura 4 muestra el modelo físico del sistema Core-XY.

Estructura mecánica
Teniendo en cuenta los objetivos particulares del proyecto y la estructura de funciones integrada del prototipo se procedió a la elaboración de esta estructura.
Material de fabricación
La Tabla 1 muestra los materiales usados para la fabricación de los componentes mecánicos, los cuales deben ser de fácil adquisición.
Tabla 1 Materiales usados para la fabricación de los componentes mecánicos en el prototipo
| Material | Uso en el proyecto |
| PLA | Para la fabricación de los componentes mecánicos del manipulador |
| Acero inoxidable | Varillas de ese material, usado como riel de los segmentos del manipulador |
| Cobre | Tubo de cobre usado como bocinas, las cuales se deslizarán en las varilla de acero |
| MDF | Planchas de 5.5 mm de espesor, usado para la fabricación de la carcasa |
| Vidrio | Usado en la fabricación del panel del tablero de ajedrez |
Componentes mecánicos
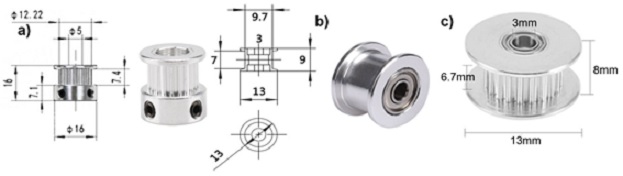
La Tabla 2 muestra las características principales de las poleas que presenta el manipulador, donde la polea dentada GT2 (Figura 5a) son las poleas motrices; 4 poleas lisas (Figura 5b) y 4 poleas dentadas con rodamientos (Figura 5c) corresponden a las poleas pasivas.
Tabla 2 Características de las poleas del manipulador
| Polea dentada GT2 | Polea lisa | Polea dentada con rodamiento | |
| Número de dientes | 20 | - | 16 |
| Ancho de la ranura (mm) | 7 | 7 | 6.7 |
| Diámetro del agujero (mm) | 5 | 3 | 3 |
| Material | Aluminio | ||
Se necesitarán 3 m de correa dentada para el manipulador cartesiano, el cual tendrá el mismo perfil de los dientes de las poleas GT2.
El imán de neodimio que va en la base de cada trebejo será cilíndrico y de medidas 2 mm x 4 mm.
El electroimán usado para el acople del efector final con el trebejo es el ELE-P13/30 cuyas características se pueden apreciar en la Tabla 3.
Modelado
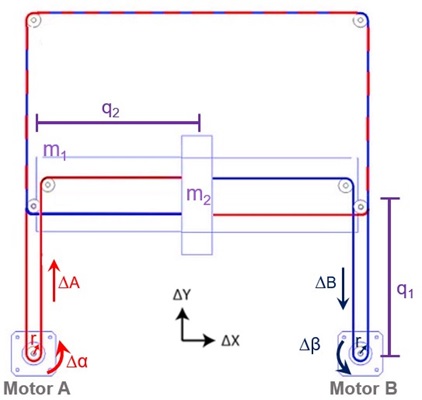
El análisis cinemático del manipulador del TACOVO está basado en el sistema Core-XY, el cual, a partir de la Figura 4, se analizó deteniendo el funcionamiento de un motor a la vez, para luego estudiar el funcionamiento de ambos motores conjuntamente, a la misma velocidad, obteniendo una relación cinemática entre los ejes escrita como:
Donde:
∆α = |
Ángulo de giro del motor A |
∆β = |
Ángulo de giro del motor B |
r = |
Radio de la polea del motor |
q1 y q2 = |
Desplazamientos del efector final sobre los ejes X e Y (Aleman et al., 2019). |
El modelo dinámico tiene por objetivo conocer la relación entre el movimiento del manipulador y las fuerzas implicadas en el mismo. Para llevar a cabo este objetivo se utilizará la metodología de Lagrange-Euler en la cual no se tienen en cuenta todas las acciones que no generen trabajo, además con esta metodología se obtiene el modelo dinámico en términos de trabajo y de energías.
Usando la formulación Lagrangiana se obtiene:
Donde:
|
Matriz simétrica no singular que relaciona el efecto inercial de los segmentos y expresa la fuerza inercial debido al movimiento del manipulador |
m 1 = |
Masa total de la estructura móvil |
m 2 = |
Masa del efector final |
|
Aceleraciones generalizadas (en este caso de los segmentos del manipulador) |
Para hallar la fuerza requerida para el movimiento de cada segmento es necesario resolver la ecuación:
Donde:
τi = |
Fuerza requerida generalizada (para mover cada segmento del manipulador) |
g = |
Fuerza de la gravedad |
u k= |
Coeficiente de rozamiento estático (Barrientos et al., 2007) |
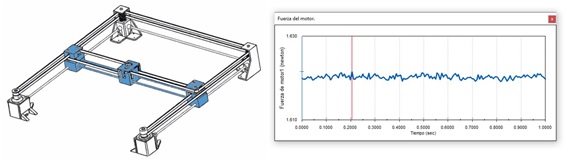
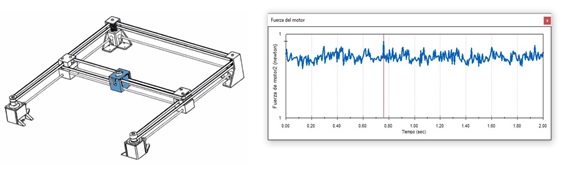
Al usar la ecuación (3) y empleando las magnitudes ofrecidas por un software CAD empleado para la simulación del manipulador, se pudieron determinar las fuerzas necesarias para mover los segmentos. La Figura 6 refleja que se necesita de 1.622 N para desplazar la estructura móvil por sus rieles a una velocidad constante, mientras que la Figura 7 muestra que se requiere de 1 N para desplazar el efector final a través de sus rieles a una velocidad constante.
Para que el efector final pueda realizar un movimiento en diagonal se requieren mover los dos segmentos a la vez, con un solo motor, por ello es necesario proporcionar al sistema dos motores que puedan manejar ambos segmentos por sí mismos. Entonces, la fuerza necesaria para desplazar ambos segmentos es de 2.622 N.
Ya determinadas las fuerzas necesarias para mover los segmentos del manipulador, así como las poleas que se usarán, se puede definir el par motor que deben poseer los motores a usar, el cual es de 1.6 N cm.
Los motores DC encargados de mover los segmentos del manipulador son dos motores bipolares paso a paso NEMA 11, cuyas características se aprecian en la Tabla 4. Estos motores presentan un torque adecuado para el funcionamiento del manipulador.
Tabla 4 Principales características del motor DC seleccionado
| Modelo: Motor paso a paso NEMA 11 11HS12-0674S | |||||||
| Resistencia / Fase (Ω) |
A / Fase (A) |
Torque (N·cm) |
Ángulo de paso (°) |
Par de sujeción (kg-cm) |
Eje de salida |
Peso (g) |
Tamaño (mm) |
| 3.8 | 0.67 | 6 | 1.8 | 0.6 | 5 mm D | 110 | 28² × 32 |
Los cálculos y simulaciones de cada pieza mecánica se diseñaron analizando los esfuerzos a los que serán sometidos y ayudarán a determinar las deformaciones y factores de seguridad. De la Figura 8 hasta la Figura 11, se muestran las partes que conformarán el ensamblaje final.
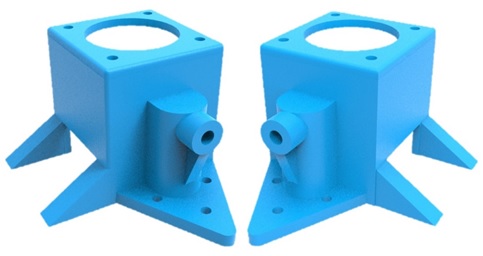

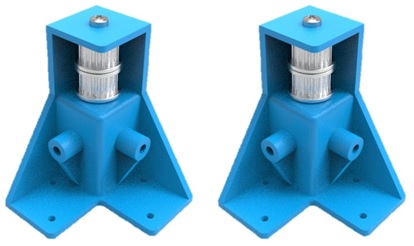
En la Figura 8 se observan los soportes que sujetarán a los motores en la estructura.
La Figura 9 muestra las piezas laterales de la estructura móvil, cada una presenta:
2 poleas lisas con rodamientos
2 tornillos M3 x 0.5 mm x 30 mm
1 bocina de bronce de 28 mm y diámetro nominal de 3/16’’
1 imán de neodimio 2 mm x 4 mm ubicado en la base de la pieza lateral derecha
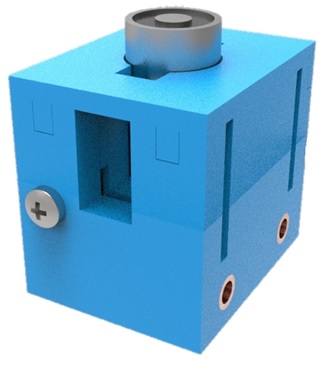
El cuerpo del efector final de la Figura 10 muestra los siguientes componentes:
1 electroimán ELE-13/30
2 tornillos M3 x 0.5 mm x 10 mm
2 tuercas M3 x 0.5 mm
2 bocinas de bronce de 28 mm y diámetro nominal de 3/16’’
1 tornillo M6 x 0.5 mm x 13 mm
1 imán de neodimio cilíndrico de 2 mm x 4 mm en la base
La Figura 11 muestra los cuerpos laterales de la estructura fija, cada una presenta:
Asimismo, el manipulador del TACOVO presenta cinco varillas de acero de 1/8’’ de diámetro y 30 cm de longitud, las cuales se usan como rieles de las partes móviles
Estructura del procesamiento de la información
Está conformado por el microcontrolador, el cual posee el algoritmo necesario para analizar el movimiento de los trebejos y controlar el movimiento del manipulador.
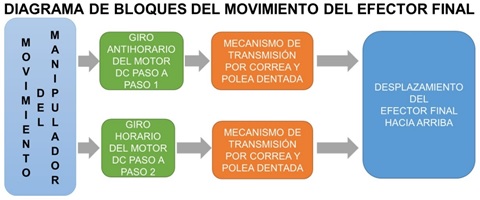
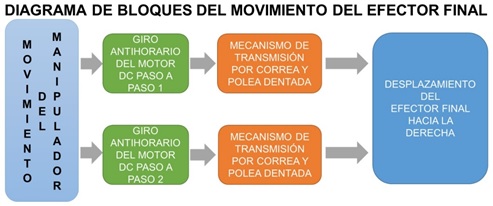
Diagrama de bloques de los movimientos del manipulador
Para maniobrar correctamente el manipulador es necesario analizar la relación que presenta el giro de las poleas del motor con el movimiento del efector final, para ello se debe estudiar la ecuación (1), obteniendo como resultado los diagramas de bloques de la Figura 12 a la Figura 17.




Programación
La Figura 18 muestra el diagrama de flujo principal de la programación, aquí se puede apreciar el proceso que se sigue para analizar el movimiento del trebejo a desplazar. La programación ocupa en la memoria Flash del microcontrolador un espacio de 43642 bytes.

MEGA 2560 PRO
Debido a que el prototipo requiere de 3 puertos seriales y además se requiere de una tarjeta de control compacta, adaptable y de fácil manipulación se optó por usar el Mega 2560 PRO, que es una tarjeta de control cuyo protagonista principal es el microcontrolador ATmega 2560, por ende, presenta las mismas características de un Arduino Mega 2560.
Estructura electrónica
Módulo DFPlayer Mini
Este módulo será el requerido para reproducir un audio que señala el turno del jugador y el movimiento que el trebejo en juego está realizando en el tablero.
Módulo Bluetooth
Para que el prototipo pueda comunicarse con un dispositivo móvil es indispensable un módulo Bluetooth que presente las especificaciones necesarias para que sea compatible con celulares o Smartphone Android y el microcontrolador. El módulo Bluetooth HC-06 será el encargado de realizar la labor mencionada.
Sensor de efecto Hall
Dos sensores de efecto Hall, donde cada uno se encuentra en un módulo, serán encargados de alertar al sistema que los segmentos del manipulador han llegado al punto de calibración entre el efector final y el tablero de juego.
A4988
Este controlador maneja al motor paso a paso a través de las ondas cuadradas recibidas del microcontrolador, donde la velocidad de desplazamiento es proporcional a la frecuencia de pulsos de esas ondas y el desplazamiento es proporcional al número de pulsos.
PCB y circuitos
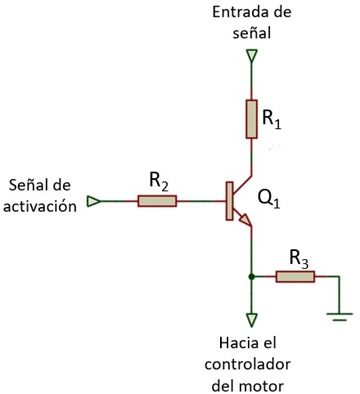
La Figura 19 muestra el circuito encargado de interrumpir la entrada de la señal de onda cuadrada hacia los controladores de los motores, ya que ambos comparten dicha señal. Gracias a este circuito el efector final puede realizar movimientos diagonales.
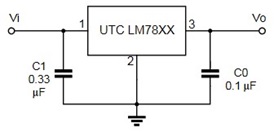
La Figura 20 muestra al circuito encargado de alimentar a la tarjeta de control, tiene por componente principal al regulador de voltaje 7809.
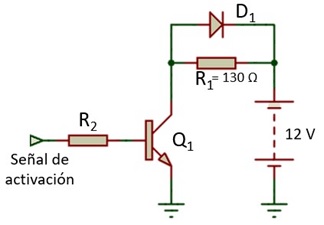
La Figura 21 muestra al circuito de activación del electroimán.
La Figura 22 muestra al circuito de la PCB del sistema electrónico del prototipo del TACOVO.

La Figura 23 muestra al PCB donde estarán alojados los componentes y circuitos anteriormente mencionados, tendrá una dimensión de 24 x 5.5cm y estará instalado entre los motores del manipulador.

Fuente de alimentación
Sumando la energía que consumirá todos los dispositivos electrónicos del sistema y agregándole un 20 % como factor de seguridad, se determinó que el prototipo deberá usar una fuente de alimentación de 12 V - 2 A.
El diagrama de bloques mostrado en la Figura 24 muestra los pines que ocupa cada componente conectado a la tarjeta de control y permite obtener una visión general de la conexión de los componentes eléctricos y electrónicos en el sistema.

Aplicación móvil
MIT App Inventor
La aplicación móvil fue diseñada en App Inventor, que es un entorno de desarrollo donde se crean aplicaciones para dispositivos móviles con sistemas Android. App Inventor ofrece una herramienta de reconocimiento de voz, que usa los servicios de voz de Google, esta se utiliza en el desarrollo de la aplicación para convertir lo hablado por el jugador en caracteres que luego serán procesados por la aplicación; además para la realización del juego remoto se creó una base de datos en tiempo real en Firebase que luego se enlazará con App Inventor. Esta aplicación contiene tres pantallas principales.
Pantalla de inicio: En esta pantalla se enlaza el Bluetooth del dispositivo móvil con el Bluetooth del tablero, luego se debe elegir el modo a jugar. El modo partida normal permite que ambos jugadores se conecten y jueguen en un mismo tablero, y el modo jugador remoto automático permite jugar una partida de ajedrez de forma remota con una persona que posea un tablero similar, en ambos casos se usan comandos de voz para el desplazamiento de los trebejos. La Figura 25 muestra una captura de dicha pantalla.

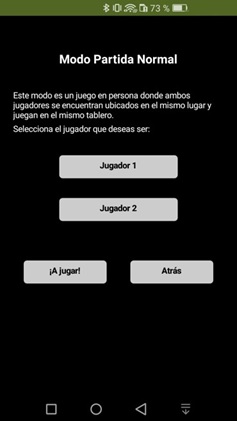
Pantalla de selección del número de jugador: En esta pantalla se muestran las opciones para la selección del número de jugador que será el usuario, luego de esto es necesario presionar el botón de “¡A jugar!” para iniciar la partida. El título y la descripción mostrada en la pantalla varía con cada selección del modo de juego. La Figura 26 muestra una captura de dicha pantalla.
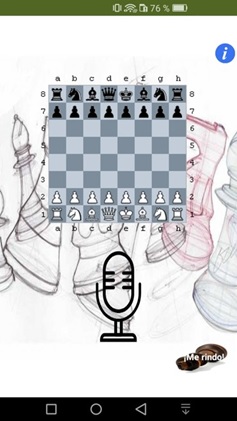
Pantalla de juego: En esta pantalla se muestra un gráfico de un tablero de ajedrez con todas sus piezas, las cuales se mueven conforme se va jugando. Además, presenta un pulsador con la imagen de un micrófono que activa el micrófono del Smartphone y un botón de rendición para terminar el juego. La Figura 27 muestra una captura de dicha pantalla.
Al finalizar la codificación, el paquete de la aplicación (.apk) ocupa un espacio de 5.81Mb y al ser instalado en el Smartphone ocupa un espacio de 21.5 Mb.
Implementación
Trebejos
Los trebejos se encuentran fabricados de PLA. Cada uno presenta una base circular de 14.59 mm de diámetro, en el centro de la base se encuentra alojado un imán cilíndrico de neodimio de 2 mm de diámetro y 4 mm de altura. La altura de cada trebejo es proporcional a la forma de este.
Carcasa
La carcasa del tablero está fabricada de MDF. La base tiene una longitud de 37 cm x 37 cm de lado y las paredes laterales son de 6 cm de altura. La tapa tiene una longitud de 38 cm x 38 cm de lado y las paredes laterales 4 cm de altura. Además, la tapa contiene al panel del tablero que está hecho de vidrio de 2 mm de grosor, cuyas dimensiones son 28.5 cm x 28.5 cm, y se encuentra en el centro de la tapa de la carcasa.
Estructura mecánica
Para una instalación adecuada de esta estructura a la carcasa es necesario ensamblarla antes sin colocar la correa dentada. Luego de fijarla en la base se procede a instalar dicha correa y a tensarla.
Estructura electrónica
Para el montaje del PCB mostrado en la Figura 23, para la instalación de los sensores y del circuito de alimentación de 12 V - 2 A, son necesarios cables AWG de calibre 16 y 26, un interruptor basculante de encendido, un Jack socket hembra y conectores molex.
Integración de estructuras
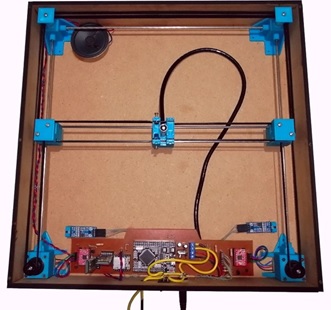
En la Figura 28 se observa la implementación del diseño mecánico y electrónico con todos sus componentes dentro de la carcasa del tablero, y en la Figura 29 se observa el prototipo con la carcasa cerrada, con el electroimán en el punto de calibración y con los trebejos en su posición inicial.

Resultados
Validación de los subsistemas
El análisis del movimiento del efector final se llevó a cabo en un software CAD donde se obtuvo un movimiento real del manipulador. Tomando como referencia las variables de la Figura 4. De la Figura 30 hasta la Figura 33, se pueden analizar los resultados obtenidos.

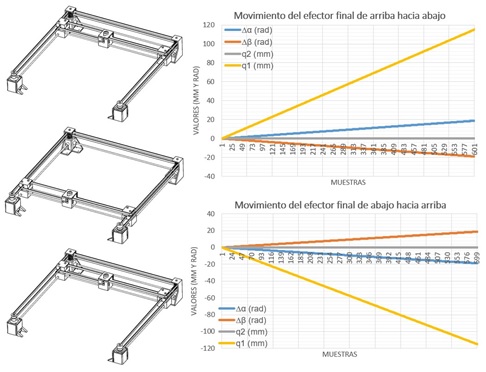
La tabla gráfica de la Figura 30 señala que ante el movimiento del efector final de izquierda a derecha y viceversa, la longitud q1 no presenta cambio alguno y las magnitudes de ∆α y ∆β son similares, es decir, que ambos motores presentan la misma velocidad.
La tabla gráfica de la Figura 31 señala que ante el movimiento del efector final de arriba hacia abajo y viceversa, la longitud q2 no presenta cambio alguno y que ambos motores presenta un giro contrario al otro.
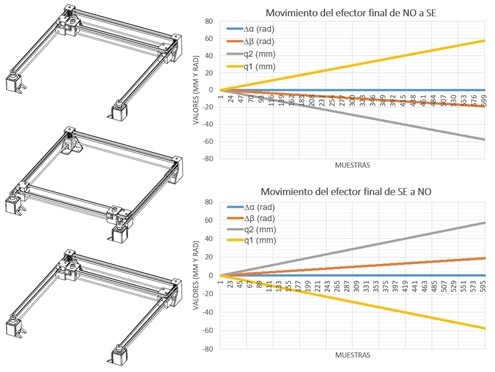
La tabla gráfica de la Figura 32 señala que ante el movimiento del efector final en diagonal de Noroeste (NO) a Sureste (SE) y viceversa, el motor 1 permanece apagado realizando todo el trabajo solo el motor 2.
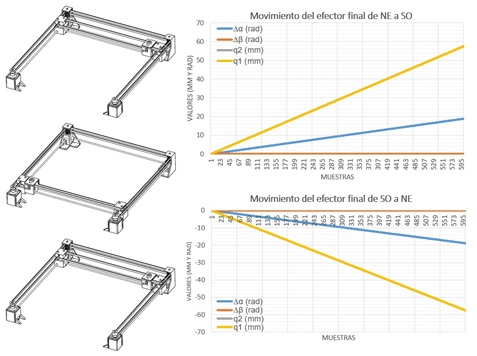
De forma similar, la tabla gráfica de la Figura 33 señala que ante el movimiento del efector final en diagonal de Noreste (NE) a Suroeste (SO) y viceversa, el motor 2 permanece apagado realizando todo el trabajo solo el motor 1.
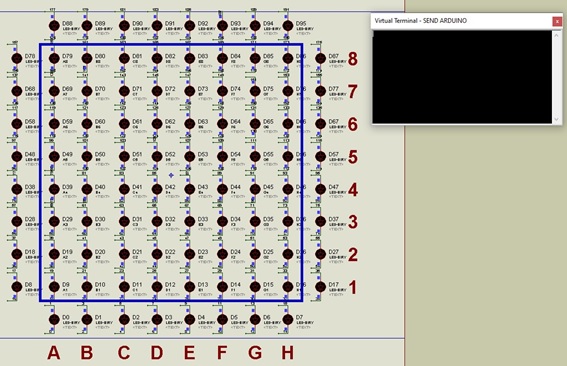
Para evaluar el movimiento que realiza un trebejo se pretendió emular un tablero de ajedrez en un software de diseño electrónico, cuyos cuadros se representan por un led como se muestra en la Figura 34, esto ayudó a demostrar el correcto funcionamiento de los algoritmos para la restricción del movimiento de cada pieza; además se pudo determinar el funcionamiento de los comandos internos de la programación.
La Figura 35 presenta el circuito que ayudó a demostrar el correcto funcionamiento del sistema electrónico. Aquí se comprobaron las señales de entrada y de salida del microcontrolador ATmega 2560.

Validación del prototipo
Para comprobar el correcto funcionamiento del prototipo se realizó una partida de ajedrez con un oponente remoto, el cual poseía un tablero de ajedrez de similares características a la mencionada en este artículo.
Al iniciar el funcionamiento del prototipo del TACOVO se presentaron las siguientes observaciones:
La calibración del efector final con el tablero resulta adecuada, el movimiento del efector final es rápido y poco ruidoso.
El audio que señala el turno y el movimiento de cada trebejo es bajo, pero entendible.
La aplicación móvil funciona de forma fluida, sin presencia de cierres inesperados ni de pantallas negras repentinas.
Para que la aplicación pueda detectar adecuadamente lo que el jugador pronuncia es necesario que el ambiente presente poco ruido, menor a 80 decibeles, y que el jugador se acerque al micrófono del Smartphone.
El tiempo que demora la aplicación en reconocer el comando de voz depende directamente de la velocidad de la red de Internet, con una buena conexión la aplicación demora 2 segundos aproximadamente.
Antes de mencionar la jugada y luego de presionar el botón en forma de micrófono de la aplicación es necesario mencionar la palabra tablero.
El movimiento del efector final hacia el trebejo es rápido y poco ruidoso.
El acople del efector final con el trebejo es el correcto.
El movimiento del efector final luego del acople con el trebejo es lento y ruidoso.
En ocasiones se presenta el desacople del trebejo con el efector final, esto es debido a que la zona de deslizamiento del trebejo no se encuentra debidamente limpia.
Es necesaria la calibración del efector final con el tablero luego de tres movimientos.
Al coronar un trebejo, un audio se escucha pidiendo que se pronuncie el nombre del trebejo por el cual se cambiará, esto se debe realizar de la misma manera como se pronuncia un movimiento en la jugada.
Tras la realización del jaque mate los trebejos se ordenan en el tablero para la siguiente partida.
El número de comandos que detecta la aplicación es de 70 las cuales son desde el A1 hasta el H8, las palabras hacia, caballo, torre, alfil, reina, y la palabra paso para no mover los trebejos en el turno.
La Figura 36 muestra las zonas donde se colocan los trebejos capturados por el oponente en el trascurso del juego.

El costo de la fabricación de los componentes, de la compra de los componentes electrónicos y de la compra de los componentes y materiales mecánicos que conforman al prototipo dio un total de 665.99 soles peruanos, equivalente a 174 dólares americanos aproximadamente.
Conclusiones
En este artículo se desarrolló un prototipo alpha de un tablero de ajedrez con un sistema de desplazamiento de los trebejos con comandos de voz y oponente remoto a través de una aplicación móvil. Dicho prototipo resultó con buenas características de maniobrabilidad y confort al ser transportado, debido al poco peso que presenta (1.5 Kg), lo que lo hace propicio para personas que presenten problemas motrices leves o de mediana gravedad.
Existen oportunidades de mejora para el prototipo, tanto como en la estructura mecánica, buscando otras alternativas de diseño del manipulador, como en la estructura electrónica, buscando un controlador de motores capaz de reducir el ruido que genera el motor al funcionar, asimismo en la aplicación móvil, mejorando el estilo y la estética en las pantallas de la aplicación.
En contraste con otros desarrollos, el costo del TACOVO es muy competitivo. Además, a diferencia de otras propuestas, la manipulación de los trebejos es mediante la voz del jugador, lo cual permite a las personas que posean problemas motrices jugar una partida de ajedrez con facilidad. Asimismo, el TACOVO innova en el uso de un sistema Core-XY para el desplazamiento de los trebejos en el tablero.
Usando de base este prototipo, para un desarrollo futuro se plantea un tercer modo de juego, el cual consistiría en que el tablero sea capaz de detectar las piezas que se muevan manualmente por el jugador.

