











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introducción
Los sistemas de riego automático miden la humedad del suelo con una red de sensores
de medición desplegada en puntos estratégicos (conjunto de puntos de control). La
región de riego a veces se divide en
De esta manera, los problemas de una red de sensores derivados de la medición de la humedad del suelo pueden descartarse. La estimación regional puede desarrollarse utilizando algunos métodos de la literatura tales como la Ponderación inversa a la distancia (IDW, por sus siglas en inglés) [3-6], así como también Kriging y Co-Kriging [7,8] y adquisición remota [9-11] .
Sin embargo, el uso de un modelo de interpolación, como los mencionados anteriormente, requiere implementar una red de sensores para monitorear las condiciones meteorológicas en una región. Lo cual sería más complejo que medir la humedad del suelo in situ. Para estimar la humedad utilizando variables como la lluvia, no basta con interpolar su valor basándose únicamente en mediciones espaciales o en registros estadísticos porque estas variables pueden no ser homogénea en una región y, por lo tanto, la estimación puede ser errónea.
El modelo difuso de estimación basado en toma de decisiones (FEADM, por sus siglas en inglés) [12] es un modelo de estimación difusa que deduce estimaciones de humedad del suelo a partir del modelado de las relaciones entre la humedad del suelo, las condiciones meteorológicas y las características del suelo y la tierra en el punto de control donde se realiza la estimación. Este modelo realiza un mínimo de mediciones y un número reducido de pruebas en desarrollo, a diferencia de algunos modelos como las redes neuronales [13,14], las máquinas de vectores (SVM) [15] y modelos hidrológicos [1,10,16].
Por otra parte, IWECASF, el modelo de ajuste inteligente de las condiciones meteorológicas basado en características espaciales (IWeCASF, por sus siglas en inglés), determina las condiciones meteorológicas en cualquier lugar de una región, a partir de las mediciones en un punto de control (punto de control primario).
IWECASF utiliza procesamiento de imágenes y modelado difuso para describir la influencia que ejercen las características espaciales de una región sobre las condiciones meteorológicas.
Un modelo integrado FEADM-IWeCASF se puede utilizar para obtener una estimación regional de la humedad del suelo mediante la realización de un conjunto de estimaciones puntuales en varios puntos de control dentro de una región. Como consecuencia, un modelo de estimación regional de la humedad del suelo compuesto de dos etapas (FEADM-IWeCASF) puede reducir la complejidad de implementación y mantenimiento de los sistemas de riego automático convencionales y su costo inherente. Además, este tipo de estimación regional de la humedad del suelo relaciona las condiciones meteorológicas y las características de los cultivos y la tierra, como factores importantes para determinar la humedad del suelo.
2. Revisión y propuesta
En la Fig. 1 se presenta una región de riego
ilustrativa. Se representan los elementos de un sistema de riego convencional (

Primero, las condiciones meteorológicas
La función de ajuste de las condiciones meteorológicas
3. Modelo de estimación de la humedad puntual
3.1. FEADM
El Modelo Difuso de Estimación basado en Toma de Decisiones (FEADM, por sus siglas en inglés) para la estimación puntual de la humedad del suelo, es un modelo difuso complementado con algoritmos de toma de decisiones, para elegir la alternativa (nivel de humedad del suelo) mejor evaluada bajo las actuales condiciones del entorno.
Sin embargo, el modelo propuesto no se limita a la toma de decisiones debido a que también permite la estimación cuantitativa de la humedad del suelo utilizando operaciones difusas.
Tampoco se limita a un sistema de estimación difusa convencional porque no es necesario realizar la evaluación de todas las combinaciones posibles de las variables de entrada debido a que se utiliza el conocimiento experto de los evaluadores para seleccionar y evaluar únicamente las variables de entrada relevantes para cada nivel de humedad del suelo definido Variables de entrada.
Para la estimación de la humedad del suelo Sme en un punto de interés con base en las condiciones del entorno, se utilizan como entrada las cinco variables en la Tabla 1, las cuales son factores relevantes en la conservación de la humedad del suelo [17,18] y son medidas con sensores integrados, mostrados en la a o calculadas en la consola de datos de la Fig. 2b.
Tabla 1 Entradas del modelo propuesto FEADM (i=5)
| I | Variable | Método de adquisición |
|---|---|---|
| 1 | Temperatura (𝑇) | Medida |
| 2 | Lluvia (𝐿) | Medida |
| 3 | Radiación Solar (𝑅𝑠) | Medida |
| 4 | Velocidad del viento (𝑉𝑣) | Medida |
| 5 | Evapotranspiración (𝐸𝑡) | Calculada |

3.1.1. Toma de decisiones
En la etapa de toma de decisiones, el modelo FEADM parte de la solución de un
problema, en el cual, se cuenta con I variables de entradas que
al ser evaluadas por J funciones de pertenencia, pueden ser
utilizadas como criterios de evaluación
Tabla 2 Criterios de decisión (i=5)
| Criterio | Variable |
|---|---|
| 𝐶 1 | Temperatura |
| 𝐶 2 | Lluvia |
| 𝐶 3 | Radiación solar |
| 𝐶 4 | Velocidad del viento |
| 𝐶 5 | Evapotranspiración |
Por otra parte, se proponen K = 5 alternativas de decisión
Tabla 3 Alternativas de decisión (k=5)
| Alternativa | Nivel de humedad |
|---|---|
| 𝐴 1 | Muy Bajo |
| 𝐴 2 | Bajo |
| 𝐴 3 | Medio |
| 𝐴 4 | Alto |
| 𝐴 5 | Muy Alto |
En este trabajo, se aplica el método presentado por [19] y las
modificaciones realizadas por [20,21] para obtener el vector de ponderación
normalizado
Para conocer el vector de ponderación
La matriz de juicios
La importancia relativa entre criterios
Tabla 4 Valores difusos de la importancia relativa
| Etiqueta linguística | TFN (f,g,h) |
|---|---|
| Extremadamente insignificante | (1⁄9 , 1⁄8 , 1⁄7) |
| Muy insignificante | (1⁄8 , 1⁄6 , 1⁄4) |
| Insignificante | (1⁄6 , 1⁄4 , 1⁄2) |
| Apenas insignificante | (1⁄3 , 1⁄2 , 1) |
| Igualmente importante | (1,1,1) |
| Apenas importante | (1,2,3) |
| Importante | (2,4,6) |
| Muy importante | (4,6,8) |
| Extremadamente importante | (7,8,9) |
Por otra parte, la matriz de juicios
De acuerdo a [20], el grado de posibilidad del análisis
extendido de [19] solo muestra el grado en el cual un TFN es
mayor a otro y no un indicador de la importancia relativa entre ellos. Con
[21], este problema es resuelto usando el método
del valor total de la integral con índice de optimismo
Donde
Se propone para cada criterio Ci, J
valores lingüísticos asociados a las funciones de membresía

Se plantean los criterios difusos
Rescribiendo (5)-(9) de la manera
Se utiliza el vector W =
(w1,...,wi,...,wI}
descrito en (4). Para ponderar los elementos
ci,j de
donde ci,j es el valor de
El valor ponderado
La ponderación de los criterios de evaluación obtenida en
Después se determina la alternativa de decisión
Es necesario definir el conjunto de evaluaciones
El número
donde
donde
La matriz
Entre más grande sea el área del punto de control más grande será la variación espacial de la humedad del suelo.
Las matrices de modelado relacional
Los criterios difusos ponderados
Para obtener la alternativa mejor evaluada
Cada valor ak correspondiente a la mejor evaluación
de la alternativa
3.1.2. Estimación difusa
A partir de los valores ak se obtiene el valor
estimado de la humedad del suelo Sme. A cada
alternativa de decisión
En este trabajo se
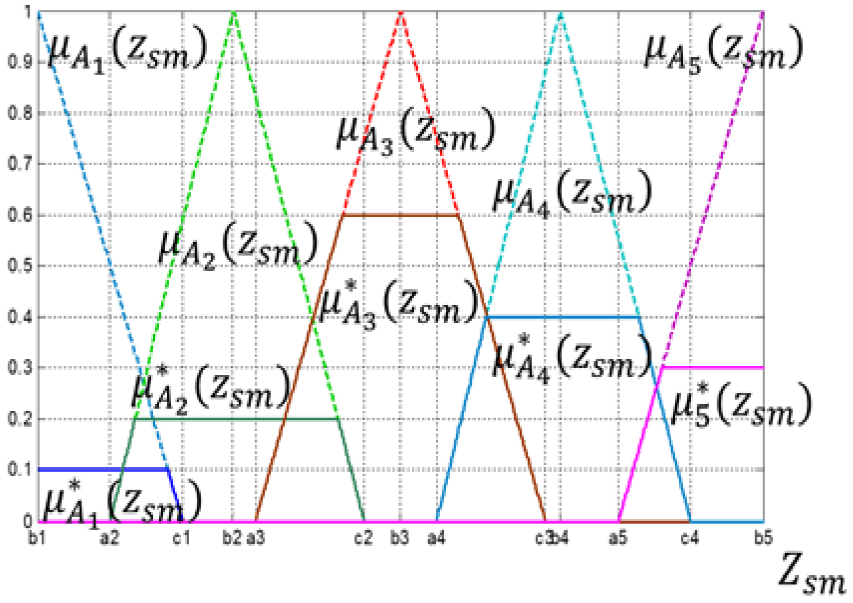
En la Fig. 4 se muestran las funciones de
membresía
Se realiza la t-conorma de las mismas utilizando la operación
max, como se muestra en (20), para
realizar la agregación de las funciones de membresía
Finalmente, para defuzificar
3.2. Experimentos
Las entradas de FEADM son Temperatura, Lluvia, Radiación Solar, Velocidad
del viento y Evapotranspiración como se describe en la Tabla 1. Estas entradas son usadas como
criterios de evaluación
FEADM comienza con la evaluación comparativa en pares ordenados
(Cx, Cy), de la
importancia relativa
Los valores
Por ejemplo, la Temperatura (C1) es
un poco más importante que la Velocidad del
viento (C4), por lo tanto
El valor sintético extendido
El índice de optimismo
De acuerdo con el vector de ponderación
En este trabajo, a cada criterio
Los valores de los criterios
Tabla 5 Valores de las entradas de FEADM
| 𝐶 𝑖 | Variable | Valor |
|---|---|---|
| 𝐶 1 | Temperatura (°𝐶) | 15.8 |
| 𝐶 2 | Lluvia (𝑚𝑚) | 20.4 |
| 𝐶 3 | Radiación solar (𝑊/𝑚2) | 200 |
| 𝐶 4 | Velocidad del viento (𝑘𝑚/ℎ𝑟) | 14 |
| 𝐶 5 | Evapotranspiración (𝑚𝑚) | 2.3 |
De acuerdo a (13), para cada evaluación
Por ejemplo, para la alternativa
Tabla 6 Mejor evaluación a (k) de las alternativas a_(k=1,2,...,k)
| Nivel de humedad del suelo | Alternativa 𝑨𝒌=𝟏,𝟐,…,𝑲 | Mejor evaluación 𝒂𝒌=𝟏,,…,𝑲 |
|---|---|---|
| Muy Bajo | 𝐴 1 | 0 |
| Bajo | ??2 | 0 |
| Medio | 𝐴 3 | 0 |
| Alto | 𝐴 4 | 0 |
| Muy Alto | 𝐴 5 | 0.385 |
Utilizando (18), se elige la alternativa mejor evaluada, la cual, en este
experimento es
Para la inferencia difusa se considera el universo de discurso de la humedad del suelo como ZSm = [0,10]. ZSm definida por el rango de medición del sensor de humedad de suelo utilizado, donde 0 representa el mínimo y 10 el máximo nivel de humedad del suelo.
Utilizando (19) y (20) se realiza la agregación de las funciones de membresía

Empleando el método del centroide definido en (21) se obtiene la humedad del suelo estimada Sme = para este experimento Sme = 9.179. Este valor fue verificado comparándolo con el valor de la humedad del suelo medido Sme = 9.5.
3.3. Discusión de resultados
La región de estimación de la humedad del suelo es un área que se extiende por
1,8 km. En la Fig. 6, se muestra una zona
de la región de estimación. Todas las pruebas realizadas se desarrollaron en
esta área. Las condiciones ambientales

Con el fin de validar los resultados obtenidos con el modelo FEADM, se utilizó el 70% del conjunto de datos para optimizar el modelo. El otro 30% se utilizó para validar los resultados. El conjunto de datos incluye una amplia gama de condiciones ambientales. Se espera que, FEADM pueda ser probada en un amplio rango condiciones meteorológicas.
Una comparación global de los resultados de FEADM se muestra en la Tabla 7. Los resultados del modelo de toma de decisiones utilizando FEADM y TOPSIS, un modelo de toma de decisiones [26-31] utilizado en este trabajo para validar resultados. Además, los resultados de la estimación de la humedad del suelo Sme se comparan con la humedad del suelo medida Smm. Los mejores resultados fueron obtenidos cuando se registran niveles de humedad del suelo Muy Bajo (A1) Medio (A3), o Muy Alto (A5). Sin embargo, existen pequeñas variaciones en las pruebas en las que se obtienen niveles de humedad Bajo (A2) y Alto (A4). Estas variaciones no afectan a la estimación.
Tabla 7 Comparación de resultados de la estimación de la humedad del suelo y la alternativa mejor evaluada
| Prueba | Humedad del suelo | Alternativa mejor evaluada | ||
|---|---|---|---|---|
| (Estimada) 𝑺𝒎 𝒆 | (Medida) 𝑺𝒎 𝒎 | (FEADM) | (TOPSIS) | |
| A | 5 | 5 | Medio | Medio |
| B | 2.7488 | 2.5 | Bajo | Bajo |
| C | 0.9856 | 1 | Muy Bajo | Muy Bajo |
| D | 0.9802 | 1.5 | Muy Bajo | Muy Bajo |
| E | 0.9831 | 1 | Muy Bajo | Muy Bajo |
| F | 8.9642 | 9 | Muy Alto | Muy Alto |
| G | 8.2963 | 8.5 | Alto | Alto |
| H | 8.9678 | 9 | Muy Alto | Muy Alto |
| I | 2.7483 | 3 | Bajo | Bajo |
| J | 2.7481 | 2.5 | Bajo | Bajo |
| K | 5 | 5 | Medio | Medio |
| L | 2.7488 | 3 | Bajo | Bajo |
| M | 5 | 5 | Medio | Medio |
| N | 5.1186 | 5 | Medio | Medio |
| O | 0.99 | 1 | Muy Bajo | Muy Bajo |
| P | 2.7487 | 3 | Bajo | Bajo |
Las pruebas F, G y H se realizaron en días con precipitaciones muy altas, mientras que en las pruebas B, C, D, I y L no se registran precipitaciones. En las pruebas sin lluvia, los niveles de radiación solar y evapotranspiración son altos.
En las pruebas con baja precipitación, como J y K, a pesar de haber registrado
los mismos niveles de lluvia, la radiación solar y la evapotranspiración son muy
diferentes en ambos días. Estos fenómenos pueden ser modelados utilizando las
matrices
El rendimiento de FEADM en las pruebas A-P es evaluado con los errores ERMS = 0.2003 el error EMA = 0.0401, así como con la desviación estándar de la diferencia entre las medias σd = 0.9814.
Un error inferior a 0,5, que fue la resolución del medidor de humedad del suelo, representa una estimación bastante precisa para determinar los requisitos de riego.
Además, la Fig. 7 representa una comparación de las estimaciones de humedad del suelo Sme utilizando FEADM y las mediciones de humedad del suelo Smm.

Fig. 7 Comparación de los resultados entre la humedad del suelo estimada (Sme ) y la humedad del suelo medida (Smm)
Existen algunas variaciones de la estimación en pruebas con niveles de humedad del suelo Bajo (A2) y Alto (A4), que podrían ser producidos por algunas acciones de riego no registradas o la resolución del medidor de humedad del suelo.
Las mejores estimaciones derivadas de FEADM se obtuvieron cuando existe un nivel de humedad del suelo Muy Bajo (A1), Medio (A3) o Muy Alto (A5).
4. Ajuste inteligente de las condiciones meteorológicas
4.1. IWECASF
El modelo de Ajuste inteligente de las condiciones meteorológicas basado en características espaciales IWeCASF, realiza tres tareas principales: extracción de las características del paisaje, selección de las características del paisaje particulares de cada punto de control y el ajuste de las condiciones meteorológicas en cada punto de control de la región.
4.1.1. Entradas
Una de las entradas son las imágenes, se adquieren utilizando la capa de satélite de Google y la capa de paisaje OpenCycleMap. Ambas se procesan utilizando el Sistema de Información Geográfica de Quantum. La escala de estas capas es 1: 10000.
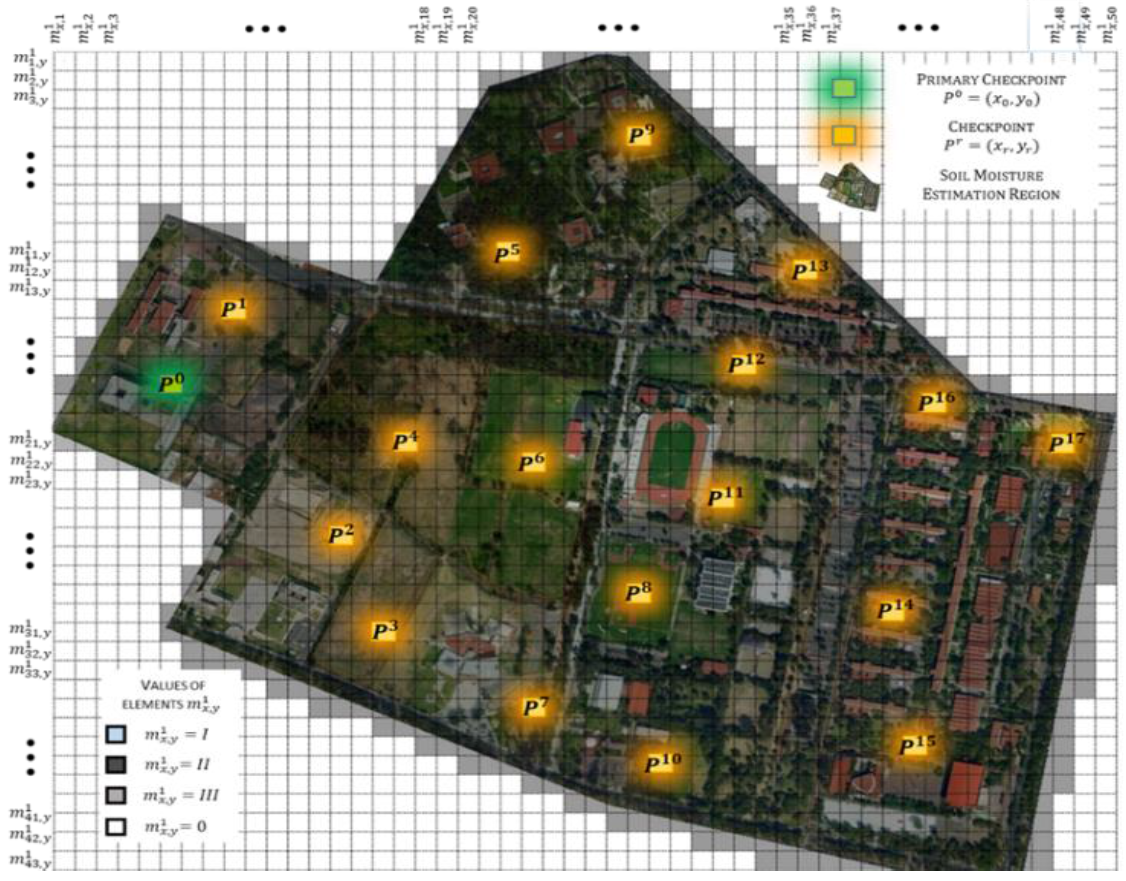
Cada imagen satelital se divide en S sectores, dando como resultado sectores pares s(x,y) donde x = 1,2,..., X, y = 1,2,..., Y, X es el ancho de la imagen dividido en S sectores e Y es la altura de la imagen dividida en S sectores. Un sector s(x,y) es un área pequeña de la región, el tamaño de esta área está determinado por el tamaño máximo con el que en todas las áreas definidas como sectores s(x,y), una característica del paisaje predomina sobre el resto.
Las zonas de suelo y cultivo son datos geográficos que necesitan ser introducidos
a IWeCASF. El cual los procesa y categoriza el tipo de suelo, el tipo de cultivo
y la etapa del cultivo de acuerdo con [32,33]. Estas bases de datos geográficas se
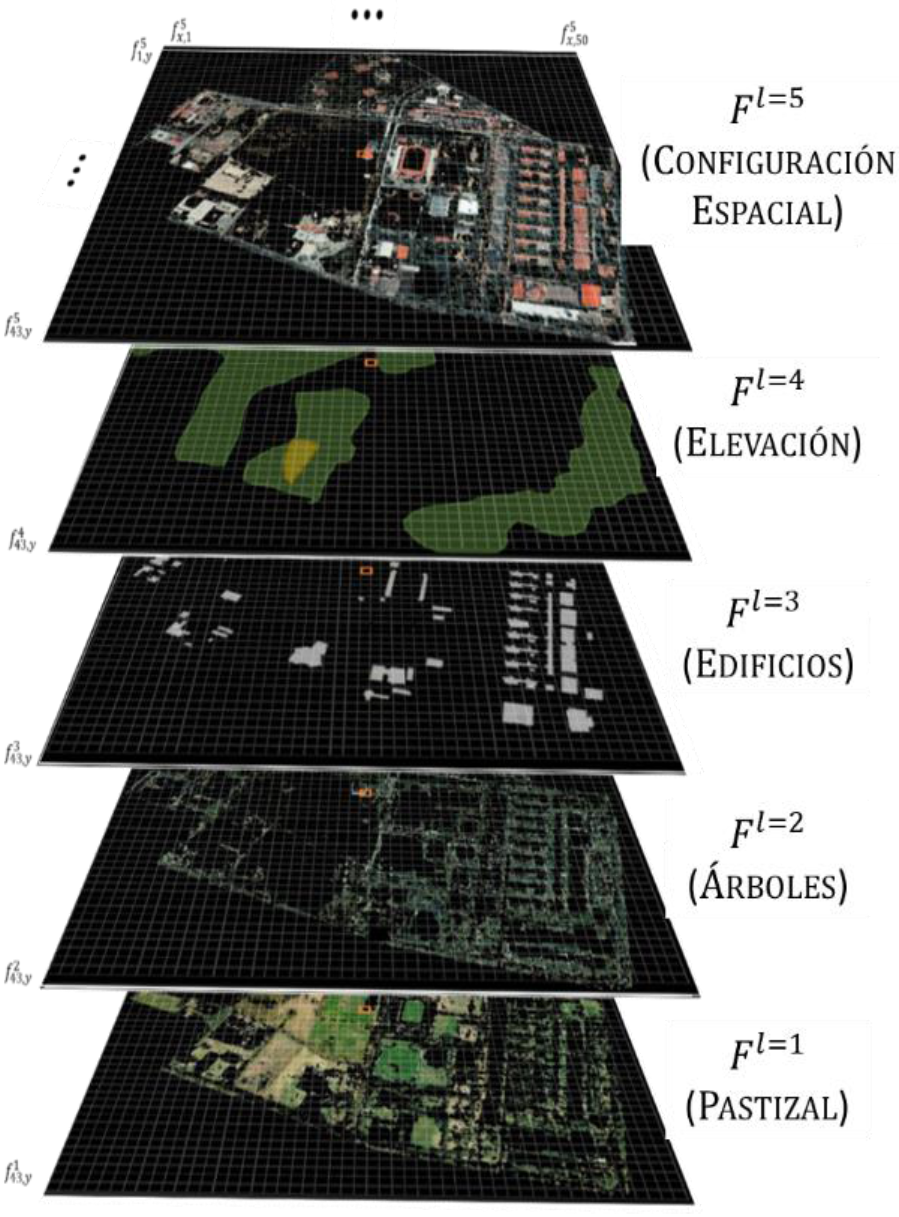
utilizan para desarrollar las matrices características
En este trabajo las matrices de características
—
—
—
Debido a las imágenes satelitales, las matrices de características
La ubicación
s(xr,yr)
de cada punto de control
Las condiciones meteorológicas medidas
4.1.2. Definición de subzonas
De acuerdo con la literatura, la región de estimación se divide en zonas de riego [1,2]. En la definición de subzonas, se realiza una división de la región de riego de acuerdo con las características del paisaje (pastizales, áreas de árboles, áreas de edificios, elevación y configuración espacial). Las imágenes satelitales de la región se procesan con la finalidad de realizar una mejor segmentación de colores para extraer características del paisaje mediante una combinación de algoritmos, filtros y técnicas [35,7].
Primero se emplea una conversión del espacio de color Rojo Verde Azul (RGB, por sus siglas en inglés), al espacio de color de la Comisión Internacional de Iluminación (CIE L * a * b, por sus siglas en inglés) [13,38], posteriormente se utiliza un proceso de decorrelación [39,40].
Algunas las características del paisaje ampliamente identificadas son el contenido de agua del suelo [13,39,41], la vegetación de un área [38,40,42], edificios y carreteras [43,44]. Luego, se realiza la segmentación de la imagen en bandas de color. Este proceso se basa en obtener el componente principal de una imagen cuando las bandas de color están correlacionadas [45].
Por lo tanto, a través de una decorrelación, los colores son exagerados lo que permite una segmentación del color más fácil [46].
Las bandas de color L son identificadas. Los objetos presentes
en cada una de las bandas de color l = 1,2,...,
L son reconocidos como objetos que pertenecen a una matriz
de características de paisaje
El objetivo es obtener la región como un cúmulo espacial de pixeles con las mismas características. Cada píxel es miembro de una región. El método de fusión, que se utiliza en este trabajo, supone que las características de todos los píxeles son diferentes al principio.
Sin embargo, a través de algoritmos como K-medias, se realiza una fusión de píxeles de acuerdo con un criterio de similitud hasta que no queden más píxeles por fusionar.
El algoritmo de K-medias establece lo siguiente: Dado un
conjunto de vectores de muestras de píxeles d-dimensionales
Esta asignación se realiza mediante la minimización de la distancia entre el
vector de observación
El resultado de la función objetivo G asigna cada muestra
Las matrices de característica del paisaje
— Matriz
— Matriz
— Matriz
— Matriz
— Matriz
Las matrices de características de paisaje son matrices X ×
Y. Para las matrices
La matriz de características de paisaje
Además, para la matriz de características del paisaje
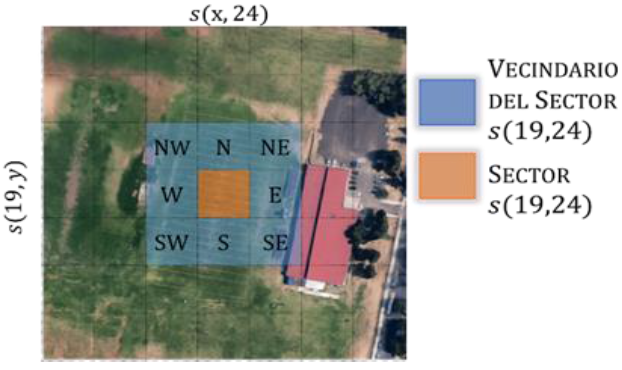
Los sectores vecinos N, S, SO no presentan edificios, carreteras
o barreras naturales; mientras que, los sectores vecinos 𝑁𝐸, 𝐸, 𝑆𝐸, 𝑂,
𝑁𝑂 denotan la existencia de edificios. IWeCASF
Posteriormente, se identifican las características del paisaje en el punto de
control en cuestión (características particulares
Los elementos
Las características particulares reales
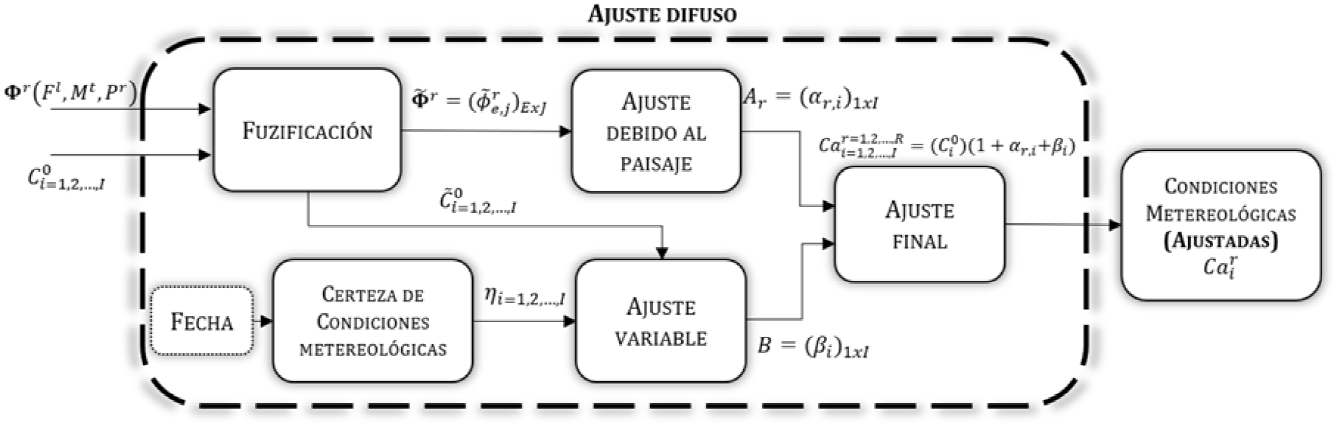
4.1.3. Ajuste difuso
El ajuste difuso está representado en la Fig. 9. Las entradas se fuzifican usando funciones de pertenencia con la forma triangular, L y gamma definidas en [7].
La fuzificación de las condiciones meteorológicas medidas
Por otra parte, para fuzificar las características particulares
La comparación
Las filas de la matriz representan cada elemento (característica particular) del
vector de comparación Φ^(0,r). Las columnas contienen el valor difuso
El universo de discurso es el mismo para todos los elementos
Tabla 8 Parámetros de las características particulares
| Valor Lingüístico | Tipo de Función | Parámetros en porcentaje (𝒇, 𝒈, 𝒉) |
|---|---|---|
| Más Bajo | L | (-60,-20) |
| Igual | Triangulo | (-25,0,25) |
| Más Alto | Gamma | (20,60) |
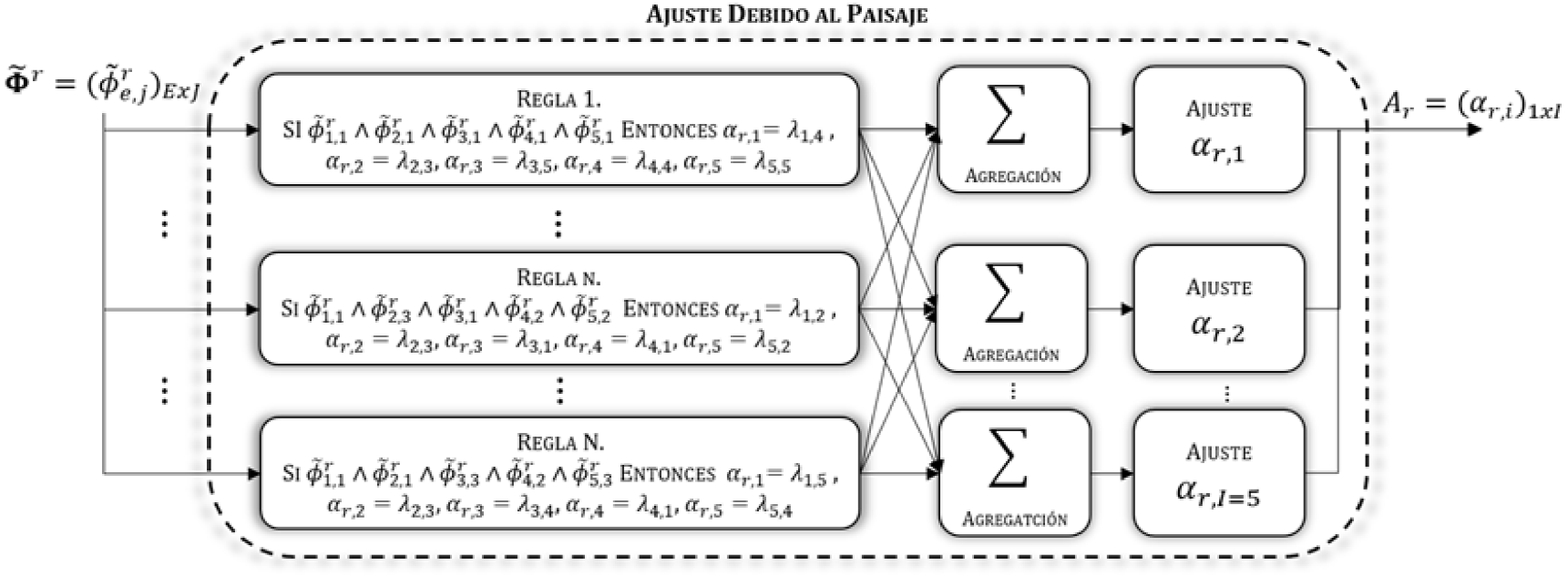
En la Fig. 10, se muestra el sistema de
inferencia difusa empleado para modelar las variaciones de las condiciones
meteorológicas debidas al paisaje. La entrada es la matriz de características
particulares difusas
Las funciones de pertenencia utilizadas para todas las salidas (factores de
ajuste
Tabla 9 Funciones de membresía de salida
| Función de salida 𝝀𝟎=𝟏,,…,𝑶 | Valor lingüístico | Tipo de Función | Parámetros (𝒇, 𝒈) 𝒐 (𝒇, 𝒈, 𝒉 ) |
|---|---|---|---|
| 𝜆𝑖,1 | Bajo | L | (-0.3,-0.15) |
| 𝜆𝑖,2 | Apenas Bajo | Triangulo | (-0.17,-0.1,-0.03) |
| 𝜆𝑖,3 | Nulo | Triangulo | (-0.05,0,0.05) |
| 𝜆𝑖,4 | Apenas Alto | Triangulo | (0.03,0.1,0.17) |
| 𝜆𝑖,5 | Alto | Gamma | (0.15,0.3) |
Las reglas n = 1,2, ..., N donde
N = 245 son establecidas y procesadas para modelar los
factores de ajuste
La regla anterior corresponde a la regla n = 47 y se puede interpretar de la siguiente manera:
— SI pastizal es Menor
El conjunto de reglas para el ajuste debido al paisaje se define en la matriz de
definición de reglas
Además,
La implicación de la matriz HL se denota por la
palabra "y", que se define como la función
min. El resultado de la evaluación
Después, los vectores
La agregación delimita las funciones de salida
El método utilizado para la agregación es el máximo definido en
(33) donde
Utilizando (21), la función agregada
Ti es defuzificada para obtener el factor de
ajuste constante
Las salidas
Las condiciones meteorológicas pueden ser diferentes en dos lugares dentro de una región, a pesar de su proximidad. Esta situación es causada por diferentes eventos [47], por ejemplo, la temporada del año, aumenta la certeza de que una condición climática como la lluvia sea similar en la mayoría de los lugares dentro de una región de interés.
Al introducir una función de distribución de certeza que dependa de la fecha, se
puede describir la certeza de la replicación de la condición meteorológica en
una región. El ajuste debido a las condiciones meteorológicas utiliza una
función de distribución de certeza para describir la certeza de la condición
climática
donde d es el mes, (f, g) son los parámetros de
la función. f indica la desviación de la temporada de lluvias
expresada en meses y g define el mes de la temporada alta de
lluvias. Los parámetros (f,g) para certezas
El ajuste debido a las condiciones meteorológicas modela la influencia de cada
condición climática sobre las demás en el punto de control
Pr usando un sistema de inferencia difusa. La
Fig. 10 representa el ajuste debido a
las condiciones meteorológicas. Aunque, para este ajuste, primero, la certeza
Además, las funciones de membresía de salida
El resultado del ajuste debido a las condiciones meteorológicas es el vector de
factores de ajuste variable B, definido en
(36), el cual es el conjunto de ajustes variables
El ajuste final se implementa para obtener las condiciones meteorológicas
ajustadas
4.2. Experimentos
La región de interés, Fig. 11, es la misma utilizada en la sección anterior. Se realizaron un conjunto de pruebas preliminares para obtener el tamaño y la resolución apropiada de la imagen, estas pruebas evitan incertidumbres en la etapa de selección de características de la subzona y una propagación de errores. En la Fig. 11, matriz de características M1 (tipo de suelo), cada sector s(x,y) tiene una extensión de 40×40 m, por consecuencia, la imagen se divide en S = 2150 sectores.
La resolución de la imagen es 1450 × 1247 pixeles,
Los valores v i=1,2,…I de las condiciones meteorológicas
Tabla 10 Condiciones meteorológicas medidas (c_(i=1,2,...,i)^0 en el punto de control primario p^0 con (i=5)
|
|
Variable | Unidades | Valor (𝑣𝑖) |
|---|---|---|---|
|
|
Temperatura (𝑇) | oC | 18.1 |
|
|
Lluvia (𝐿𝑙) | 𝑚𝑚 | 0 |
|
|
Radiación solar (𝑅𝑠) | 𝑊/𝑚2 | 890 |
|
|
Velocidad del viento (𝑉𝑣) | 𝐾𝑚/ℎ𝑟 | 16 |
|
|
Evapotranspiración (𝐸𝑡) | 𝑚𝑚/𝑑 | 5 |
Se procesaron dos imágenes para obtener las matrices de características de
paisaje
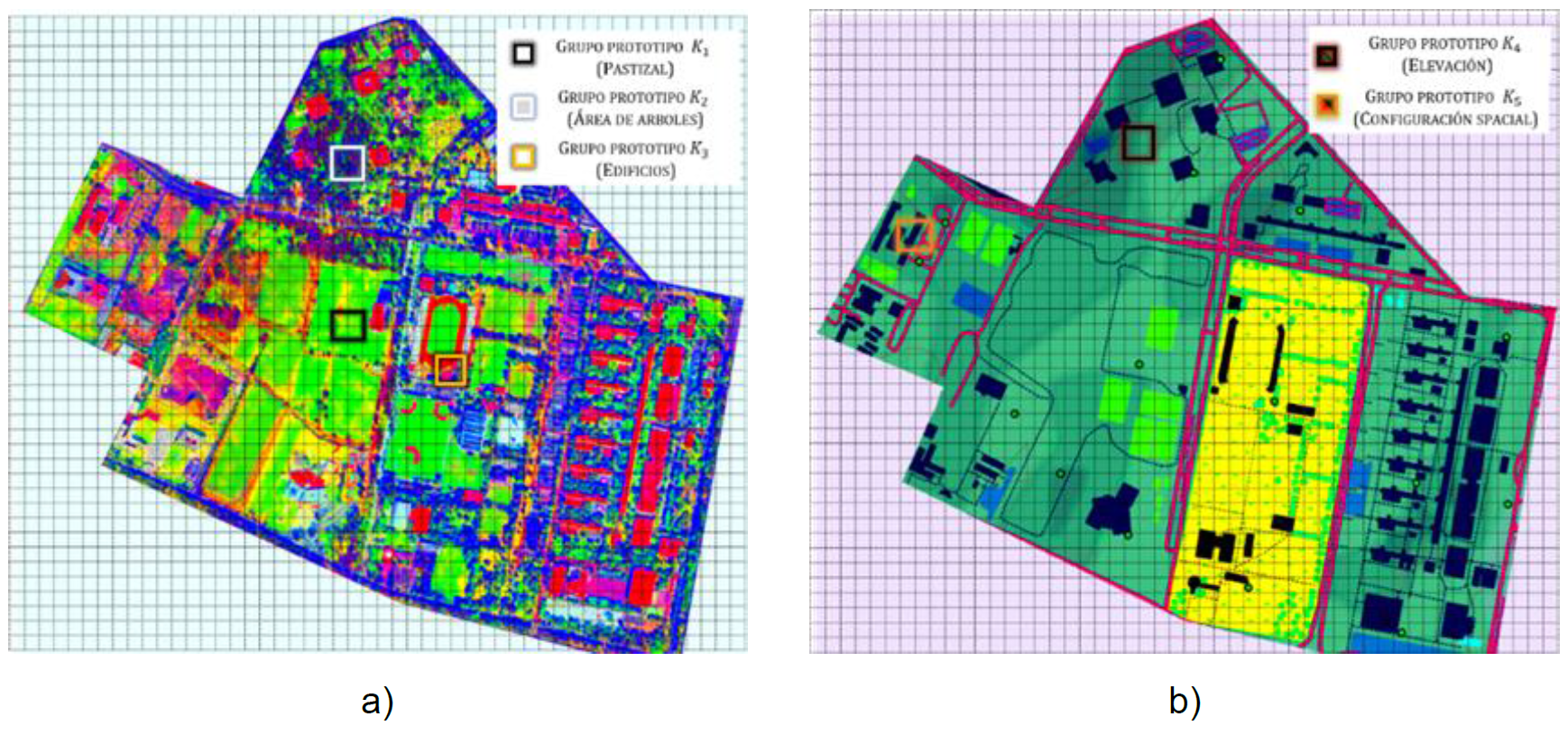
Fig. 12 Región de interés bajo la decorrelación. a) Imagen usada para
obtener las matrices
La Fig. 12b se usa para identificar la elevación y la configuración espacial.
La segmentación de colores de las imágenes procesadas se realiza con (26).
Los grupos
Por ejemplo, las matrices de características del paisaje

Por lo tanto, en el caso de F1 (pastizal), el valor
del elemento
De acuerdo con la Fig. 11, el punto de
control P4 tiene la ubicación
s(x4 = 21,
y4 = 17). Los cálculos desarrollados en este
experimento corresponden al punto P4. Los elementos
del vector de características particulares
Es decir, hay 818 pixeles correspondientes a F1 (pastizales), en el punto de control P4, del mismo modo hay 17 pixeles correspondientes a F3 (árboles) y así sucesivamente:
El vector de características particulares
Para la fuzificación de las condiciones meteorológicas
El resultado de la comparación
La matriz difusa de características particulares se obtiene utilizando (30) y los
parámetros de la Tabla 9. En (43), se
muestra la matriz de características particulares resultante
De acuerdo con la Fig. 10, el ajuste debido a paisaje realiza la evaluación de N = 245 reglas. Las reglas n son de la forma:
La regla anterior (n = 41) puede ser interpretada como a continuación:
— SI pastizal es Mayor (
De acuerdo con (31) y (32) usando la fila n = 41 de las matrices
La agregación se realiza de acuerdo con (33). La función resultante Ti se defuzifica utilizando el método de centroide descrito en (21). Cuando las salidas i = 1,2, ..., I están defuzificadas, el vector de factor de ajuste constante A4 se conforma como en (34).
El vector de factor de ajuste constante A4, derivado del análisis anterior, se muestra en (45):
Posteriormente, se calcula la certeza de las condiciones meteorológicas
El ajuste debido a las condiciones meteorológicas es un proceso similar al
utilizado en el Ajuste debido al paisaje. Sin embargo, en este ajuste, las
entradas son las condiciones meteorológicas difusas
El resultado es el vector de factores de ajuste variable mostrado en (48):
Después de obtener los vectores Ai y Bi, se utiliza (37)(37) para obtener el ajuste final de las condiciones ambientales. Por ejemplo, en (49), se muestran las condiciones meteorológicas derivadas del análisis realizado.
De acuerdo a la Tabla 11, el valor medido
de la temperatura es
Tabla 11 Comparación de condiciones meteorológicas en el punto de control P4
| Condición meteorológica | Punto 𝑃 0 | Punto 𝑃 4 | ||
|---|---|---|---|---|
| Medidas |
Ajustadas |
Medidas |
||
| 𝑖 = 1 | Temperatura (°𝐶) | 18.1 | 19.9878 | 19 |
| 𝑖 = 2 | Lluvia (𝑚𝑚) | 0 | 0 | 0 |
| 𝑖 = 3 | Radiación solar (𝑊/𝑚2) | 890 | 982.8276 | 916 |
| 𝑖 = 4 | Velocidad del viento (𝑘𝑚/ℎ𝑟) | 16 | 15.9935 | 18.2 |
| 𝑖 = 5 | Et (𝑚𝑚/𝑑) | 5 | 5.249 | 5.2 |
En la Tabla 11 se comparan las
condiciones meteorológicas
4.3 Discusión de resultados
La región que se utiliza en este trabajo para realizar el ajuste de las condiciones meteorológicas no es tierra de cultivo, esto permite probar el modelo IWeCASF en una región más compleja con diferentes características de paisaje bajo condiciones controladas. Además, en un terreno puramente agrícola, es muy frecuente que no haya muchas características naturales o no naturales del paisaje que afecten las condiciones meteorológicas, necesarias para validar este modelo.
El análisis experimental preliminar consiste en evaluar el rendimiento de IWeCASF
para determinar los parámetros iniciales. El tamaño del sector con mejores
resultados es utilizado en este documento 40 × 40 m
(ERMS = 0.0412). Los sectores
s(x,y) con tamaño inferior a 40 × 40
m, como 20 × 20 m o 15 × 15
m, no disminuyen mucho el error
(ERMS = 0.041, ERMS
= 0.0408) pero sí aumentan el costo computacional de IWeCASF debido al aumento
del número de sectores La resolución utilizada en este artículo 1450 × 1247, es
decir,
IWeCASF puede soportar resoluciones más grandes tal como 2000 × 1720; es decir,
Se implementó un conjunto de suites de sensores integrados (ISS) para registrar
las mediciones de las condiciones meteorológicas en diferentes puntos de
control. IDW, un método de interpolación de la literatura [3,4], y las mediciones
de las condiciones meteorológicas realizadas con las ISS, se emplearon para
validar las condiciones meteorológicas ajustadas
El error cuadrático medio normalizado (ERMS) también se utiliza para evaluar el rendimiento de la interpolación.
En la Tabla 12 se muestra una comparación de los resultados obtenidos, estos valores corresponden a las condiciones meteorológicas en el punto de control P4.
Tabla 12 Comparación de condición meteorológica (Temperatura) ajustada
| Prueba |
|
|
|
|---|---|---|---|
| A | 10.61 | 11 | 10.89 |
| B | 14.43 | 12.9 | 13.8 |
| C | 15.81 | 14.7 | 14.5 |
| D | 19.07 | 21 | 21.1 |
| E | 18.97 | 18.5 | 19.97 |
| F | 17.32 | 17 | 15.4 |
| G | 27.4 | 27.8 | 27.77 |
| H | 17.76 | 18 | 18.25 |
| I | 18.99 | 20 | 20.96 |
| J | 16.92 | 17.6 | 16.2 |
| K | 12.9 | 12.7 | 13.03 |
| L | 14.36 | 14.2 | 14.47 |
| M | 13.5 | 12.8 | 11.83 |
| N | 19.05 | 20.1 | 19.95 |
| O | 20.77 | 21 | 20.88 |
| P | 30 | 29.5 | 29.4 |
En el caso de la temperatura,
Con referencia a la lluvia,
La Fig. 14 muestra el rendimiento de los
ajustes para

Fig. 14 Comparación de errores ERMS para la condición
climatológica
La radiación solar ajustada
El error
Los ajustes de IWeCASF
Las diferencias existentes entre las mediciones de las condiciones meteorológicas
IWeCASF presenta dos ventajas claras sobre un método de interpolación para determinar las condiciones meteorológicas y lograr una estimación regional de la humedad del suelo. La primera es un mejor rendimiento al ajustar una variable inconsistente como la lluvia. La certeza de la condición climática η2es la responsable de este resultado. La segunda es que IWeCASF no requiere desplegar más de una estación de medición cuando se está ejecutando, a diferencia de los métodos de interpolación que sí requieren más de un punto de medición para realizar la interpolación.
La distancia desde el punto de control P0 y las diferentes características del paisaje reverbera en la precisión de los resultados. Los errores normalizados ERMS en el punto de control P15 son los siguientes:
— ERMS = 0.0467 para la temperatura.
— ERMS = 0.0475 para la lluvia.
— ERMS = 0.0187 para la radiación solar.
— ERMS = 0.1182 para la velocidad del viento.
— ERMS = 0.0386 para la evapotranspiración.
En el caso de
El caso de
Sin embargo, en las tierras de cultivo, no es habitual encontrar barreras dispersas a lo largo de la región de interés. El rango de ajuste recomendado de IWeCASF es de 1.4 km medido desde P0. Este rango se define en función del error de las condiciones meteorológicas ajustadas.
No todos los ajustes de las condiciones meteorológicas más allá de esta distancia
presentan un error significativo; por ejemplo, el error de
Modelo integrado para la estimación regional
5.1 Modelo integrado IWECASF-FEADM
El esquema de un modelo de estimación regional de la humedad del suelo basado en FEADM - IWeCASF se presenta en la Fig. 15.

5.1.1. Entradas
Las entradas requeridas por el modelo integrado son las mismas descritas en las
secciones 3.1.1 y 4.1.1. Aunadas a éstas, se encuentra el agua de riego, la cual
es una matriz
5.1.2. Modelo integrado
El modelo integrado IWeCASF-FEADM está conformado por IWeCASF, cuyos resultados son complementados con el registro de agua de riego para luego ser suministrados como entradas a FEADM, el cual determina la estimación puntual de la humedad del suelo en cada punto de control. El resultado es una estimación regional de la humedad del suelo a partir de un conjunto de estimaciones puntuales.
IWeCASF (descrito detalladamente en la sección 4), determina las condiciones climáticas dentro de una región permitiendo el uso de un modelo de estimación puntual de la humedad del suelo como FEADM (sección 3).
Los valores suministrados como entradas a FEADM, son las condiciones
meteorológicas reales
FEADM (sección 3) recibe como entrada las condiciones meteorológicas reales
Estas son procesadas para obtener el nivel de humedad del suelo (estimación puntual de la humedad del suelo Smr), en un área delimitada (punto de control Pr).
5.1.3. Estimación regional
La humedad del suelo en cada punto de control Pr de
la región debe ser determinada para obtener una estimación regional. Como
consecuencia, FEADM se implementa R veces, una vez por cada
punto de control
5.2 Experimentos
Las imágenes satelitales de la región de estimación se dividen en S = 2150 sectores s(x,y), como se describe en la sección 3.1.1. El total S = 2150 de sectores s(x,y), la extensión de cada sector s(x,y) (40×40 m), y la resolución de la imagen (1450×1247) están determinadas por las pruebas preliminares. La imagen satelital de la Fig. 11, muestra la región de interés, la ubicación s(xr,yr) de algunos puntos de control Pr y la matriz de características M2 (tipo de cultivo).
La profundidad de la estimación es de 30 cm y es mantenida constante durante todas las evaluaciones.
En este experimento, cada sector s(x,y) se
considera un punto de control. Los valores
Las características del paisaje
Utilizando (27) y (28) el vector de características particulares
Usando (29), se realiza la comparación
La fuzificación de
Los Sistemas de Inferencia Difusa (FIS, por sus siglas en inglés), utilizados
para determinar los valores de ajuste Λr y B se
describen en la sección 4.2. Después de evaluar las reglas N =
245 el resultado del factor de ajuste constante
La certeza
Al final, IWeCASF determina las condiciones meteorológicas en cada punto de
control Pr utilizando (37), los ajustes constantes
Por lo tanto, las condiciones climáticas reales
Las condiciones meteorológicas reales
FEADM comienza con la comparación de criterios Ci, la
obtención de la matriz de juicio
Las matrices
La mejor evaluación αk de cada conjunto de evaluación
Ek se determina utilizando (17). El conjunto de
mejores evaluaciones αk resultante es
[0,0,0,0.0264,0.0061]T. De acuerdo con (18), la mejor alternativa
evaluada
Finalmente, la estimación p de la humedad del suelo Smr se realiza con (20) para la agregación difusa y (21) para la defuzificación.
La humedad del suelo estimada Smr en el punto de
control Pr = s(22,22) se muestra en
(63), mientras que el valor de la humedad del suelo
El análisis previo debe desarrollarse para cada punto de control
Pr. El resultado es una estimación puntual de la
humedad del suelo en cada sector s(x,y). La
Fig. 17 ilustra la estimación regional

5.3 Discusión de resultados
En el modelo integrado los resultados de IWeCASF se complementaron con la adición del registro de agua de riego. Sin embargo, si no se considera el registro de agua de riego y se aplica FEADM como se propone, los resultados serían como se muestran en la Fig. 18.

Fig.18. Estimación regional de la humedad del suelo
En este caso, la humedad del suelo Smr es mayor en los puntos de control cubiertos de árboles, por ejemplo, Pr = s(13,22) con Smr = 6.32, que en los puntos de control de pastizales Smr = 5.09 como Pr = s(28,28). Las áreas de árboles preservan mejor la humedad del suelo. El modelo integrado puede funcionar sin considerar el registro de agua de riego.
Este modelo también es adecuado para determinar la humedad del suelo en regiones de siembra por temporal.
En la Fig. 17 y la Fig. 18, cada s(x,y) es
un punto de control Pr y la estimación regional
Los errores de estimación de cuatro puntos de control Pr de la región son comparados para explicar el desempeño del modelo integrado con respecto a la distancia en la cual se realiza una estimación puntual.
Los gráficos corresponden a los puntos de control Pr = (17,8), Pr = (22,26), Pr = (14,35), Pr = (33,47). Las estimaciones en el punto de control Pr = (17,8) son las más precisas, el error normalizado ERMS para este punto es ERMS = 0.0361, mientras el error para el Pr = (22,26) es ERMS = 0.0479, para punto Pr = (14,35) el error es ERMS = 0.0519 y para el punto de control Pr = (33,47) el error es ERMS = 0.0544.
De acuerdo con estos resultados, y al recordar la ubicación del punto de control
primario P0 = (18,6), el desempeño del modelo
integrado depende de la distancia entre el punto de control
Pr y el punto de control primario
P0 ; es decir, la estimación puntual de la
humedad del suelo es más precisa cuando se obtiene más cerca del punto de
control donde se miden las condiciones climáticas
Sin embargo, los resultados obtenidos en los puntos de control dentro del rango de estimación (1.5 km), presentan un error normalizado que no implica una limitación para obtener la humedad del suelo para determinar el suministro de agua de riego. Para los puntos de control fuera de este rango, se recomienda establecer otro punto de control primario para realizar otra estimación regional.
6 Conclusiones
En este trabajo se desarrolló un modelo de estimación regional de la humedad del suelo con base en estimaciones puntuales.
Está compuesto por tres modelos, el primero realiza una estimación difusa basada en la toma de decisiones (FEADM) el cual permite obtener la estimación puntual de la humedad del suelo; el segundo modelo desarrollado es el ajuste inteligente de las condiciones meteorológicas basado en las características espaciales (IWeCASF), que hace posible que FEADM pueda ser usado para la estimación regional; este modelo determina las condiciones meteorológicas en cualquier punto de control, a partir de su medición en el punto primario.
El tercer modelo es la integración de los dos anteriores IWeCASF-FEADM que permite una estimación regional de la humedad del suelo a partir de un conjunto de estimaciones puntuales. En todos se consideran el tipo de cultivo, el tipo de suelo, las condiciones meteorológicas y las características del terreno como factores importantes para estimar la humedad. Mediante pruebas experimentales se verificaron los resultados los cuales fueron satisfactorios.
Los modelos desarrollados para la estimación permiten describir la variabilidad espacial de la humedad en una región de tamaño moderado. Además, consideran las interacciones entre la humedad del suelo, las condiciones meteorológicas, las características del suelo y del cultivo. Los resultados, derivados de la validación de cada uno de los modelos creados, determinan que el error de estimación obtenido es adecuado y permite determinar el nivel de humedad minimizando las mediciones. El rango de estimación, en este trabajo, es de 1,5 km desde el punto de control primario.

