











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introducción
En muchos problemas de la vida real, tal como los de Ingeniería o Finanzas, uno se enfrenta con el problema de que varios objetivos tienen que ser optimizados simultáneamente. Simas de tres objetivos están involucrados, el problema resultante se denomina como un problema de optimización de muchos objetivos (MaOP, por sus siglas en ingles) en la literatura. Aunque, el trato a los MaOPs es un campo de investigación relativamente nuevo (hasta el momento, se han estudiado principalmente problemas con dos o tres objetivos) se le considera muy importante ya que hoy en día los procesos de toma de decisiones son cada vez más y más importantes.
Por ejemplo, el objetivo más importante en el problema de enrutamiento de vehículos, el cual es utilizado como demostrador en este estudio, probablemente sea la minimización de costos totales. Sin embargo, otros aspectos importantes (entre otros) son la utilización de los vehículos, el número de vehículos usados, el tiempo total, la distancia total, el balance de ruta, la satisfacción del cliente y el tiempo de retraso. Todos estos aspectos son tan importantes que pueden ser planteados como objetivos individuales en un problema de optimización.
Una característica importante de los MaOPs es que su conjunto de soluciones, el denominado conjunto de Pareto, no consiste en una solución única, como en el problema 'clásico' de optimización escalar (SOPs, por sus siglas en inglés) donde solo un objetivo es considerado. En lugar de ello, el conjunto de Pareto de un MaOP típicamente forma una superficie de dimensión (k - 1), donde k es el número de objetivos implicados en el problema. Para MaOPs discretos, como el que es considerado en este estudio, la magnitud del conjunto de soluciones se incrementa con k, y este crecimiento incluso es exponencial en k para ciertos casos.
Para lidiar con los problemas de optimización multi-objetivo (MOPs) existen diferentes algoritmos evolutivos que han captado el interés de muchos investigadores en las ultimas décadas (ver 11, 9, 51, 22 y sus referencias). Dentro de las razones para esto se encuentra que estos algoritmos son aplicables a una amplia gama de problemas y son de naturaleza global; por lo tanto, en principio no depende del conjunto de candidatos iniciales (es decir, la población inicial). Además, debido a su enfoque basado en conjuntos, permite calcular una representación de tamaño finito del conjunto de Pareto entero en una sola ejecución del algoritmo. La mayoría de estos algoritmos especializados, llamados EMOAs (Algoritmos evolutivos multi-objetivos) son diseñados para tratar con problemas con solo unos cuantos objetivos (típicamente, de 2 a 4). A pesar del poco tiempo en el tratamiento de MaOPs, debido a su importancia, cada vez más y más algoritmos han sido desarrollados para tratar con muchos objetivos. Como ejemplo, se encuentra el uso de EMOAs con un tamaño de población grande (por ejemplo, 10,000 individuos) 29, el algoritmo evolutivo multi-objetivo dinámico (DMOEA) 53, y el algoritmo evolutivo basado en redes (GrEA) 50.
No obstante, los conjuntos de Pareto de los MaOPs; por lo general, no se pueden calcular en su totalidad de manera eficiente debido a sus enormes magnitudes, y consecuentemente, estos conjuntos no pueden ser visualizados apropiadamente. Por lo tanto, incluso con la ayuda de algoritmos evolutivos, si el número de objetivos es alto, no se puede esperar que la solución seleccionada por el tomador de decisiones (TD) sea, de hecho, la solución 'ideal' del MaOP -la solución dentro de todo el conjunto de Pareto que satisfaga en mayor medida al TD- con respecto a la configuración dada.
En este artículo, se argumenta que tiene sentido realizar pequeños ajustes a una solución óptima seleccionada de un determinado MaOP. Específicamente, se proponen dos enfoques diferentes, donde, comenzando de una solución inicial x0, se generen otras soluciones xi, i = 1,..., N, de tal manera que la secuencia de las soluciones candidato realicen un movimiento en las direcciones especificadas por el usuario. Para obtener las soluciones deseadas xi, una secuencia específica de SOPs tiene que ser resuelta. En este estudio, se utiliza el problema de enrutamiento de vehículos con ventanas de tiempo como ejemplo demostrativo y un algoritmo genético, el cual es capaz de resolver problemas de optimización combinatoria utilizando un ordenamiento de permutaciones y operadores evolutivos especiales para su representación, para la resolución de los SOPs, ya que ha demostrado ser eficiente en esta clase de problemas. Los resultados numéricos en diferentes escenarios muestran los beneficios de este nuevo enfoque.
Es importante dejar en claro que la idea de dirigir la búsqueda a lo largo del conjunto o frente de Pareto hacia una determinada dirección no es nueva. El método de búsqueda dirigida descendente 44 y el Pareto Tracer 34 son capaces de realizar esta búsqueda; sin embargo, ambos están restringidos a problemas continuos y su enfoque no puede extenderse a dominios discretos mientras se utilice la información del gradiente.
El resto de este artículo es organizado de la siguiente manera: en la sección 2 se presenta brevemente los antecedentes requeridos y se discute el trabajo relacionado. En la sección 3 se proponen dos métodos para realizar pequeños ajustes a la solución dada de un MaOP. En la sección 4, se presentan algunos resultados numéricos y, finalmente, se presentan las conclusiones y las futuras rutas de investigación en la sección 5.
2. Antecedentes y trabajos relacionados
2.1. Optimización de múltiples y de muchos objetivos
Matemáticamente, el problema de optimización multiobjetivo (MOP) puede expresarse de la siguiente manera:
F : Ω → ℝ k se define como el vector de funciones objetivo:
donde f: Ω → ℝ denota la i-ésima función objetivo. El dominio de F se define como
La optimalidad de un MOP es definida mediante el concepto de dominancia.
Definición 1
(a) Sean υ, w ∈ ℝk. El vector υ es menor que w (υ <p w), si υi < wi para todo i ∈ {1,..., k}. La relación ≤p se define análogamente.
(b) Un vector y ∈ D es dominado por un vector x ∈ D (x ≺ y) con respecto a (1) si F(x) ≤p F(y) y F(x) ≠ F(y), en otro caso se dice que y es no dominado por x.
(c) Un punto x ∈ D es nombrado óptimo de (Pareto) o punto de Pareto si no existe otro y ∈ D que domine a x.
(d) El conjunto PD de todas las soluciones óptimas de Pareto es llamado conjunto de Pareto y su imagen F (PD) recibe el nombre de frente de Pareto.
Para MOPs continuos (i.e., Ω = ℝn) se puede demostrar que tanto el conjunto como el frente de Pareto forman típicamente-i.e., bajo ciertas condiciones de regularidad-una superficie de dimensión k - 1 26. Análogamente, la magnitud del conjunto de Pareto crece conforme el valor de k se incrementa, incluso de manera exponencial en algunos casos. Es por esta razón que MOPs con k > 3 son denominados problemas de optimización con muchos objetivos (MaOPs), notación que se usara a partir de ahora.
La optimización evolutiva multiobjetivo (EMO) ha dado origen a una gran variedad de EMOAs (algoritmos para la optimización evolutiva multi-objetivo) 9, 11, los cuales no requieren que las funciones objetivo cumplan con determinadas características o propiedades, y se basan en procedimientos estocásticos de búsqueda. Estos algoritmos simulan los principios básicos del proceso evolutivo sobre una población (un conjunto de individuos o soluciones), por medio de los llamados operadores evolutivos. Existe una gran variedad de EMOAs que consideran diversos mecanismos para asignar la aptitud a un individuo, la mayoría de ellos utiliza el concepto de dominancia de Pareto como su principal forma de discriminar las soluciones y guiar la búsqueda 9, 11. Recientemente, los EMOAs se han vuelto muy populares en una gran variedad de aplicaciones y han demostrado ser muy adecuados para MOPs complejos con dos o tres funciones objetivo. Dos de los EMOAs más utilizados son el algoritmo genético elitista de clasificación no dominada (NSGA-II, por sus siglas en inglés), propuesto por K. Deb et al. 12 y el algoritmo evolutivo multiobjetivo basado en descomposición (MOEA/D, por sus siglas en inglés), propuesto por Zhang et al. 51.
Un enfoque distinto se da cuando el tomador de decisiones tiene una idea aproximada sobre el problema, o bien, es capaz de proporcionar información sobre sus preferencias. En este caso es posible utilizar EMOAs que manejen las preferencias del usuario (ver 10, 33 y sus referencias). Este tipo de métodos busca "ayudar a un tomador de decisiones a considerar los múltiples objetivos simultáneamente y encontrar una solución optima de Pareto que lo satisfaga" 6. Se presenta a continuación una clasificación típica de los métodos basados en las preferencias, en función de cómo son expresadas por el TD 4: (i) métodos a priori, en donde las preferencias se expresan antes de calcular soluciones eficientes, por ejemplo a través de una función de utilidad 23 o mediante un punto de referencia 13; (ii) métodos a posteriori, aquí el TD elige la solución de su preferencia después de que se ha calculado un conjunto de soluciones eficientes (por ejemplo, 42, 40 ); (iii) métodos interactivos, en este enfoque, el DM guía la búsqueda con cierta función de utilidad y dicha función puede cambiar durante el proceso de optimización debido a la nueva información adquirida, por ejemplo 38, 7, 37, 48; y finalmente (iv) los métodos no basados en las preferencias, en donde no está disponible la información adicional sobre las preferencias, la idea es encontrar un equilibrio entre los objetivos 4.
Sin embargo, varios investigadores han señala-do algunos inconvenientes con el uso de EMOAs para resolver problemas que tienen 4 o más funciones objetivo 17, 28, 30, 39 Estas dificultades se deben al hecho de que conforme el número de funciones objetivo se incrementa, también crece la proporción de individuos no dominados en la población. Una expresión de esta proporción e para un problema de dimensión M, tal que dos soluciones sean clasificadas bajo el criterio de dominancia como equivalentes, está dada por
Recientemente, los métodos que buscan mejorar el desempeño de los EMOAs para los MaOPs han sido de mucho interés. Es posible clasificar estos métodos en dos grupos principales: (i) métodos que utilizan una relación de preferencia alternativa, y (ii) métodos que transforman el MaOP original en un SOP.
En el primer grupo se pueden encontrar ejemplos de diferentes relaciones de preferencia, como el orden de preferencias 15, una generalización de la optimalizad de Pareto la cual utiliza un par de definiciones de optimalizad más estrictas; o las relaciones difusas 17 basadas en el número de componentes mayores, menores e iguales entre dos vectores.
Por otra parte, el segundo grupo presenta su propia clasificación. Basados en funciones de logro, como el MOEA/D 51; basados en indicadores, como el algoritmo evolutivo multiobjetivo de selección con la métrica S (SMS-EMOA, por sus siglas en inglés), el cual trata de minimizar el Hipervolumen (HV) y el algoritmo de estimación del hipervolumen para optimización multiobjetivo (Hype, por sus siglas en inglés) 2 con el mismo propósito; basados en técnicas de reducción de la dimensión, como el algoritmo evolutivo de búsqueda de esquinas de Pareto (PCSEA, por sus siglas en inglés) 45, el cual hace una reducción de la dimensionalidad buscando las esquinas del frente de Pareto; y finalmente, basados en la partición del espacio, como el optimizador evolutivo multiobjetiivo de clasificación ϵ(ϵR-EMO, por sus siglas en inglés) 1.
El tratamiento de MaOPs con la incorporación de las preferencias del usuario ha sido recientemente abordado en 24, aquí se propone un método que no requiere parámetros adicionales para aproximar una región de interés. En este trabajo los autores asumen que el TD expresa sus preferencias en la forma de un único punto de referencia. Sin embargo, el uso de una dirección, como medio para indicar las preferencias del TD, es una idea novedosa aplicada a MaOPs. Esta forma de definir las preferencias permite explorar el frente de Pareto y el resultado esperado es un camino de soluciones óptimas, que puede proporcionar información adicional en el proceso de la toma de decisiones.
2.2. Problema de enrutamiento de vehículos con ventanas de tiempo
El problema de enrutamiento de vehículos con ventanas de tiempo (VRPTW, por sus siglas en inglés) consiste en determinar el conjunto óptimo de rutas de vehículos idénticos (con la misma capacidad limitada) de manera de que todos los clientes (cuyas demandas son conocidas) sean atendidos una vez dentro de una ventana de tiempo dada para cada uno 16. La formulación original de este problema está dada como
s.a.
Las restricciones (4a) y (4b) plantean que exactamente un vehículo debe entrar y exactamente uno debe partir, respectivamente. Las restricciones (4c) y (4d) indican que el número de los vehículos que dejan el depósito es igual al número que entra. La restricción (4e) es la restricción de capacidad, la cual establece que las rutas tienen que ser conectadas y que la demanda en cada ruta no tiene que superar la capacidad del vehículo y la restricción (4f) asegura que las ventanas de tiempo sean tomadas en cuenta. Finalmente, la restricción (4g) define el dominio de las variables.
Para resolver este problema en el campo de muchos objetivos se utiliza como demostrador el VRPTW con cinco objetivos, los cuales son: minimización de la distancia, minimización del tiempo total, maximización de la eficiencia, mini-micción del número de vehículos y minimización del balance de ruta.
En primer lugar, la distancia es considerada como la suma de las distancias recorridas por cada vehículo, incluyendo su regreso hacía el almacén. El tiempo total es aquel que lleva realizar todas las entregas, esto incluye el tiempo del recorrido, de servicio y, de existir, el tiempo de retraso o de espera. La eficiencia está basada en la puntualidad de la entrega, dentro de las ventanas de tiempo se encuentra una hora la cual es considerada como la mejor para realizar la entrega por lo que la eficiencia es del 100%, conforme la entrega se aleje de esta hora la eficiencia baja. Si no se cumple con la entrega dentro de las ventanas de tiempo se tendrá una eficiencia del 0 %. El número de vehículos son el total necesario para realizar todas las entregas, cabe mencionar que estos vehículos necesitan utilizar el máximo posible de su capacidad. Finalmente, el balance de ruta es el equilibrio entre la carga de trabajo de cada vehículo, se espera encontrar un conjunto de rutas en el cual cada vehículo viaje aproximadamente la misma distancia.
En la literatura estos objetivos son frecuentemente utilizados, los más comunes han sido la distancia y el número de vehículos los cuales están presentes como objetivos en varios estudios 3, 49, 27, 32, 47. El tiempo total es empleado en 18, como uno de los tres objetivos a optimizar. La eficiencia se considera en 20 y 25 como la satisfacción del cliente, la cual depende del instante de llegada de la entrega y el balance de ruta aparece en 35 y 32.
El VRPTW ha sido sujeto de estudio en diversos trabajos; sin embargo, la mayoría de estos solamente resuelven problemas con dos y tres objetivos 32, 5, 36. Uno de los estudios con el mayor número de objetivos es 21, con cuatro objetivos considerados que son: minimización de distancia, minimización de números de vehículos, minimización de tiempos de espera y maximización de satisfacción del cliente. Sin embargo, los resultados obtenidos son enfocados en encontrar las mejores soluciones conocidas en la literatura y no enfocadas en algún punto en específico como se plantea en este estudio.
3. Métodos
A continuación se proponen dos métodos de ajuste fino para una solución dada x0, seleccionada por el tomador de decisiones (TD) que posiblemente fue obtenida a través de técnicas de programación matemática o de un algoritmo evolutivo. Iniciando de x0, una secuencia de soluciones candidato xi , i = 1,..., N es generada a través de una dirección especificada por el usuario.
En este trabajo una dirección es la forma de indicar las preferencias del usuario. Al hacerlo de esta forma es posible especificar las funciones objetivo que desean mejorarse, las que serán sacrificadas e incluso en qué medida se verán afectadas durante el proceso de búsqueda. Esta idea se detalla a lo largo de este trabajo con diversos ejemplos.
3.1. Cambio en el espacio objetivo
El primer método de ajuste que se propone está basado en la suposición de que el TD tiene una dirección d preferida en el espacio objetivo. Es decir, dado x0, el TD está interesado en una solución x1 del MaOP que se encuentra en el entorno de x0 y tal que el valor en el espacio objetivo posee
donde t > 0 es un tamaño de paso (pequeño) dado. Por ejemplo, si el TD quiere reducir el valor del primer objetivo él/ella podría establecer
(suponiendo un problema bi-objetivo por razones de simplicidad y para no perder la generalización). Como otro ejemplo, si el TD quiere reducir el valor de f1 a costa de f2 donde f1 es considerada más importante que f2 (con un factor de 2), él/ella puede establecer
y se puede continuar del mismo modo. Ya que es muy poco probable que exista un punto x1 que sea exactamente como la Ecuación (5) (tenga en cuenta que el frente de Pareto alrededor de F(x0) es desconocido), se debe calcular la 'mejor aproximación' la cual se ha hecho de la siguiente manera
donde
En el cual, Z1,i denota el i-ésimo componente del punto de referencia Z1, λ = (λ1,..., λk)T es un vector de pesos con λi ≥ 0, i = 1,..., k y λ ≠ 0.
Por lo tanto, al proceder de esta manera se obtiene una secuencia de soluciones candidato tales que la respectiva secuencia de imágenes realice (idealmente) un movimiento en la dirección d. El Algoritmo 1 muestra el pseudocódigo del método propuesto. La elección de

La Figura 1 muestra dos escenarios hipotéticos, de nuevo para un problema bi-objetivo debido a que se tiene una mejor visualización. Para x0, el punto de referencia Z1 es factible cuando se elige una dirección d = [1, -1]. Es decir, existe un punto

3.2. Cambio en el espacio de pesos
El segundo algoritmo de ajuste que se propone se basa en la suposición de que el TD tiene una idea acerca de la importancia de preferencia de cada uno de los objetivos y le gustaría hacer un cambio conforme a esto en el espacio de pesos. Este método está basado en el método de suma ponderada 19 el cual probablemente sea el método de escalarización más antiguo para MOPs. Más precisamente, dado un vector a de pesos tal que
(α es también llamada una combinación convexa), entonces, el objetivo a optimizar es minimizar la suma ponderada de los objetivos
El cambio en el espacio de pesos puede ser realizado como se muestra a continuación: asumiendo que una combinación convexa α(0) es dada y un vector ∆α ∈ ℝk el cual representa los cambios deseados con la propiedad
entonces, el nuevo vector de pesos puede ser calculado a través de
donde t > 0 es un tamaño de paso dado. Es fácil de ver que si t es lo suficientemente pequeño, entonces α(1) es también una combinación convexa. Como ejemplo se puede considerar que los pesos iniciales están dado por
para un problema hipotético de tres objetivos, y que el TD quisiera dejar la importancia en f1 mientas incrementa la importancia en f2 y reduce f3. Por lo tanto, se obtiene
y por consiguiente
Un problema que permanece es que el vector inicial de pesos α(0) no se conoce exactamente a menos que la solución inicial x0 sea obtenida a través del método de suma ponderada. Por lo tanto, si α(0) es solo una aproximación, se puede llegar a tener un gran cambio no deseado en la solución de (11) cuando se utiliza el nuevo peso. Para evitar esto, fue modificado el método de suma ponderada como se muestra:
donde ϵ > 0 es un valor (que depende del problema) el cual tiene en
principio la misma influencia en la solución
4. Resultados numéricos
A continuación se presentan algunos resultados hipotéticos para los métodos de ajuste propuestos. Se considera cada método en un MaOP discreto con 5 funciones objetivo y en un MaOP continuo con 10 funciones objetivo.
Como MaOP discreto, se ha optado por tomar el VRPTW con 5 los objetivos explicados anteriormente con fines ilustrativos. Fueron utilizados datos de referencia de 8 y fue seleccionado un problema con 100 variables que dan origen a los cinco objetivos que se consideraron: distancia f1, tiempo total f2, número de vehículos f3, eficiencia f4 y el balance de ruta f5. Con el fin de resolver los SOPs definidos en este trabajo, fue utilizado un algoritmo genético, donde el VRPTW se representa como una lista de n + 1 nodos, aquí n es él número de clientes, el nodo i ∈ {1, n} representa un cliente, y el nodo 0 representa el deposito. Cada nodo también se asocia con la demanda del cliente, tiempo de espera, los límites de tiempo y el tiempo de servicio. La solución inicial se genera mediante la elección de una permutación aleatoria que representa los nodos, formando una lista de longitud n, donde cada nodo aparece una sola vez y los rendimientos de los vehículos no se consideran. El resultado se basa en los siguientes parámetros: tamaño de la población = 200, número de generaciones = 3000, la probabilidad de cruza = 0.9 y probabilidad de mutación = 0.25.
En primer lugar, se considera el ajuste a través del cambio en el espacio objetivo. Para ello, se considera el siguiente escenario: con base en el conocimiento previo del problema, se ha elegido el conjunto de referencia inicial como Z0 = [2200, 530000, 19,0.45, 77] y se calculó la solución (optima inicial x0 mediante la resolución de (9).
El correspondiente vector objetivo es F(x0) = [2298.4, 489780, 19,0.42129, 85.6]. Además, se asume que el TD desea explorar las posibles soluciones optimas alrededor de x0 donde f2 se mejora con un sacrificio de los valores de f1 y f5, lo que induce la dirección d = [100, -7500, 0, 0, 1.65]. Los 20 nuevos puntos de referencia se establecen como
Para resolver cada SOP se establecieron 200 individuos y 30,000 evaluaciones de la función como criterio de paro para cada punto de referencia en el conjunto Se realizaron 30 ejecuciones independientes bajo las condiciones antes descritas. La Figura 2 muestra los valores resultantes de una ejecución aleatoria utilizando la gráfica de radar 31 a cada iteración para ilustrar los valores de los objetivos. En este tipo de gráfica un mejor valor de la función objetivo se representa con un vértice del polígono más cercano al círculo.

Fig. 2 Representación con la gráfica de radar del resultado del primer método de ajuste para una ejecución aleatoria del algoritmo. Las soluciones se muestran desde x0 en la esquina superior izquierda hasta x20 en la esquina inferior derecha
La Figura 3 muestra el mismo resultado, pero esta vez se representa la iteración i contra los valores de cada función objetivo (se denomina grafica de línea 31 ). En esta gráfica, se muestran también los valores de los puntos de referencia. Como se puede observar, se obtiene una muy buena aproximación (note que un resultado perfecto solo puede obtenerse si Zi coincide con el frente de Pareto, lo cual no es el caso aquí).
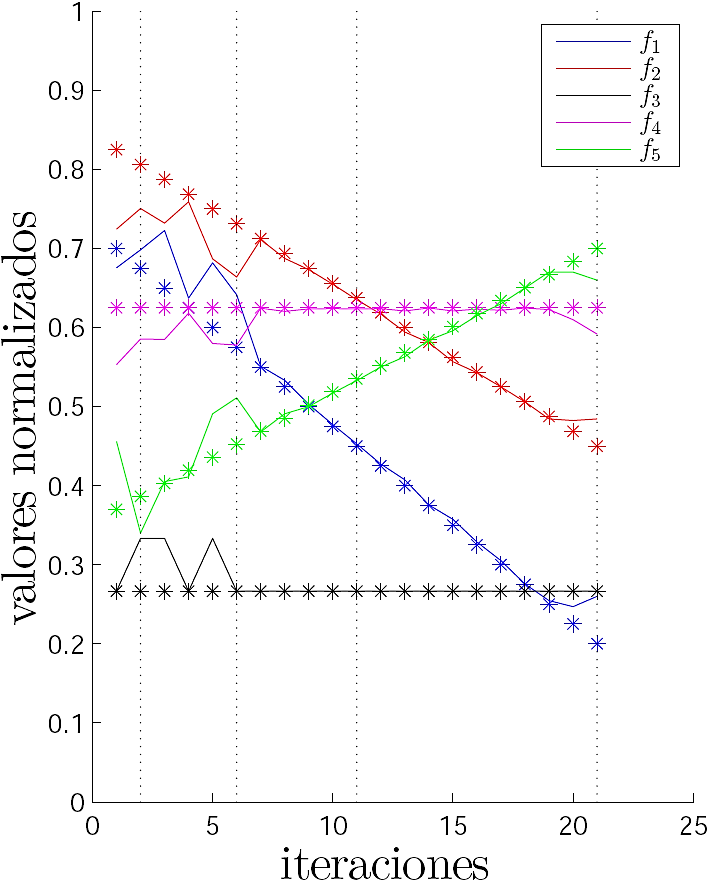
Fig. 3 Representación con la gráfica de línea del resultado del primer método de ajuste para una ejecución aleatoria
Por su parte, la Tabla 1 muestra los valores de las funciones para tres soluciones seleccionadas las cuales siguen la dirección d especificada por el TD.
Tabla 1 Valores seleccionados de las funciones objetivo de una ejecución aleatoria para el primer escenario
| Punto | f1 | f2 | f3 | f4 | f5 |
|---|---|---|---|---|---|
| F (x5) | 2434.2 | 465600 | 19 | 0.431103 | 91.1 |
| F(x10) | 3188.2 | 454080 | 19 | 0.449417 | 93.3 |
| F(x20) | 3960.3 | 393780 | 19 | 0.436728 | 106 |
Con el fin de comparar nuestro método, se utiliza) también el enfoque de conjunto de aspiración que se propone en 41. En este trabajo se extiende la idea de métodos de puntos de referencia, ya que el objetivo es minimizar una relación de la imagen de una población hacia un conjunto de referencia dado. Más precisamente, los autores proponen resolver el siguiente SOP:
donde ∆p denota la distancia de Hausdorff promedio (en los resultados que aquí se presentan se utiliza el valor p = 2), y Z: = {Z0, Z1,..., Z20} es la unión de los puntos de referencia considerados. Para resolver este problema, se ha considerado un tamaño de población de 200 y se ha fijado un límite de 65,000 evaluaciones de función para el problema (19), con el fin de obtener un desempeño general similar (note que una evaluación de la función en (19) es equivalente a n · N evaluaciones de función de F). Se realizaron también 30 ejecuciones independientes con este enfoque. La Figura 4 muestra la gráfica de línea del resultado obtenido para una ejecución aleatoria. Como puede verse, el comportamiento no es tan bueno como en el obtenido en el resultado anterior. Para tener una mejor comparación de los resultados, se consideran los siguientes indicadores: en primer lugar, el indicador de cobertura de conjunto (CS, por sus siglas en inglés) 52 el cual calcula la dominancia relativa que hay entre dos conjuntos. Sean A, B ∈ Ω dos conjuntos, el CS se define como la relación de la pareja ordenada (A, B) al intervalo [0, 1]:
En segundo lugar, se propone el uso de la distancia total (DT) entre el conjunto de referencia Z ∈ ℝk y la imagen de la aproximación obtenida A. i.e.,
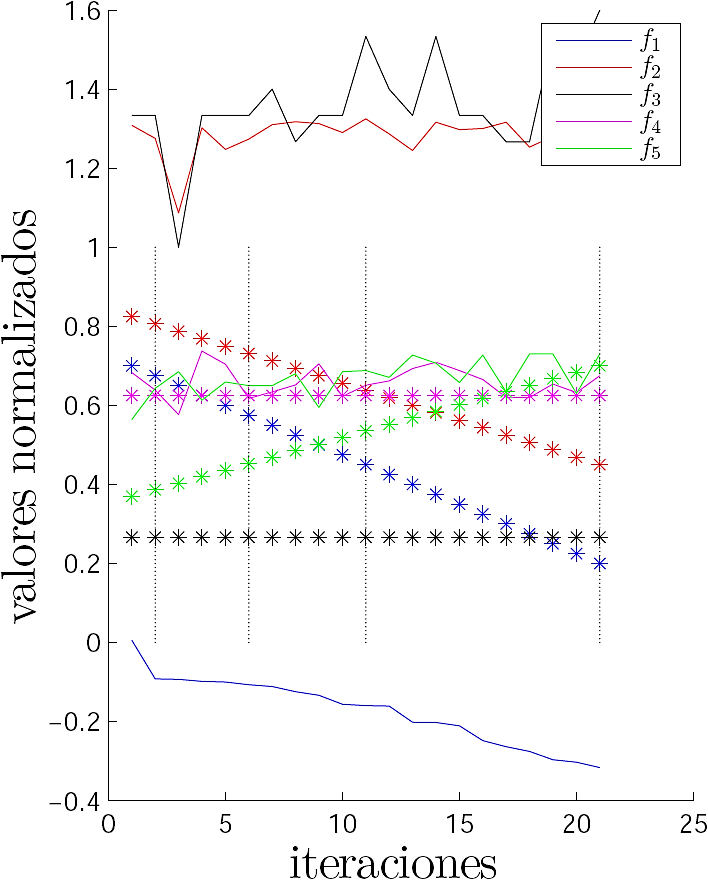
Fig. 4 Representación con la gráfica de línea del resultado del enfoque de logro usado para la comparación
Con el fin de hacer comparaciones justas, se utilizaron las 20 soluciones de la población final del enfoque de aspiración (19) que más contribuyen al valor de ∆p 43. Los resultados considerando las 30 ejecuciones de cada método se muestran en la Tabla 2.
Tabla 2 Valores de los indicadores de los dos métodos elegidos para el primer escenario. Se indican el valor mínimo, la media junto con la desviación estándar y el valor máximo en cada caso. Las pruebas presentan una significancia estadística bajo la prueba de Wilcoxon
| Indicador | Método de Ajuste | Método de Aspiración |
|---|---|---|
| CS | 0.9500 | 0.0000 |
| 0.9975 (0.0112) | 0.000 (0.0000) | |
| 1.0000 | 0.0000 | |
| DT | 3.3169e+04 | 3.4846e+05 |
| 4.3045e+04 (5.2092e+03) | 3.8645e+05 (2.5070e+04) | |
| 5.2426e+04 | 4.1134e+05 | |
| Ap | 3.2517e+03 | 4.0561e+04 |
| 4.3355e+03 (3.3590e+02) | 4.6899e+04 ((3.6755e+03) | |
| 4.8641e+03 | 5.7172e+04 | |
La Tabla 2 revela que el enfoque de ajuste es mejor de acuerdo con ambos indicadores. Los resultados muestran una significancia estadística bajo la prueba de Wilcoxon en todos los casos.
Ahora, se considera un escenario hipotético para el segundo enfoque de ajuste. Se toma el mismo problema de 5 objetivos y se elige un peso inicial α(0): = [0.2,0.2,0.2,0.2,0.2] ∈ ℝ5. La solución al problema de suma ponderada para α(0) está dado por el vector x0 con F(x0) = [2679.5,363900,13,0.348953,95.7]. Además, se ha elegido ∆α = [0.3, -0.2, -0.2, -0.2,0.3] y ∈ = 10,000. ∆α, lo que corresponde a una reducción de f1 y f5, mientras que el valor de los objetivos f2, f3 y f4 son sacrificados. Como secuencia de los pesos se tiene entonces
Se considera una población de 200 individuos y se establecen 30,000 evaluaciones de función como condición de paro para obtener la solución de cada problema del tipo (17). Aunque este meto-do no será comparado, se realizaron también 30 ejecuciones independientes bajo las condiciones antes descritas. Los resultados se muestran en las Figuras 5 y 6 para una ejecución aleatoria. La Tabla 3 muestra los valores de las funciones objetivo para las iteraciones elegidas i = 5,10 y 20 de la misma ejecución seleccionada previamente. Estas iteraciones (así como la inicial) se indican en la gráfica de línea mediante una línea vertical punteada y en la gráfica de radar mediante un color diferente del polígono. Los valores de cada función objetivo han sido normalizados, en ambos casos, con base en los resultados obtenidos por los métodos de ajuste. Se conserva la misma normalización en la comparación contra el enfoque de logro.
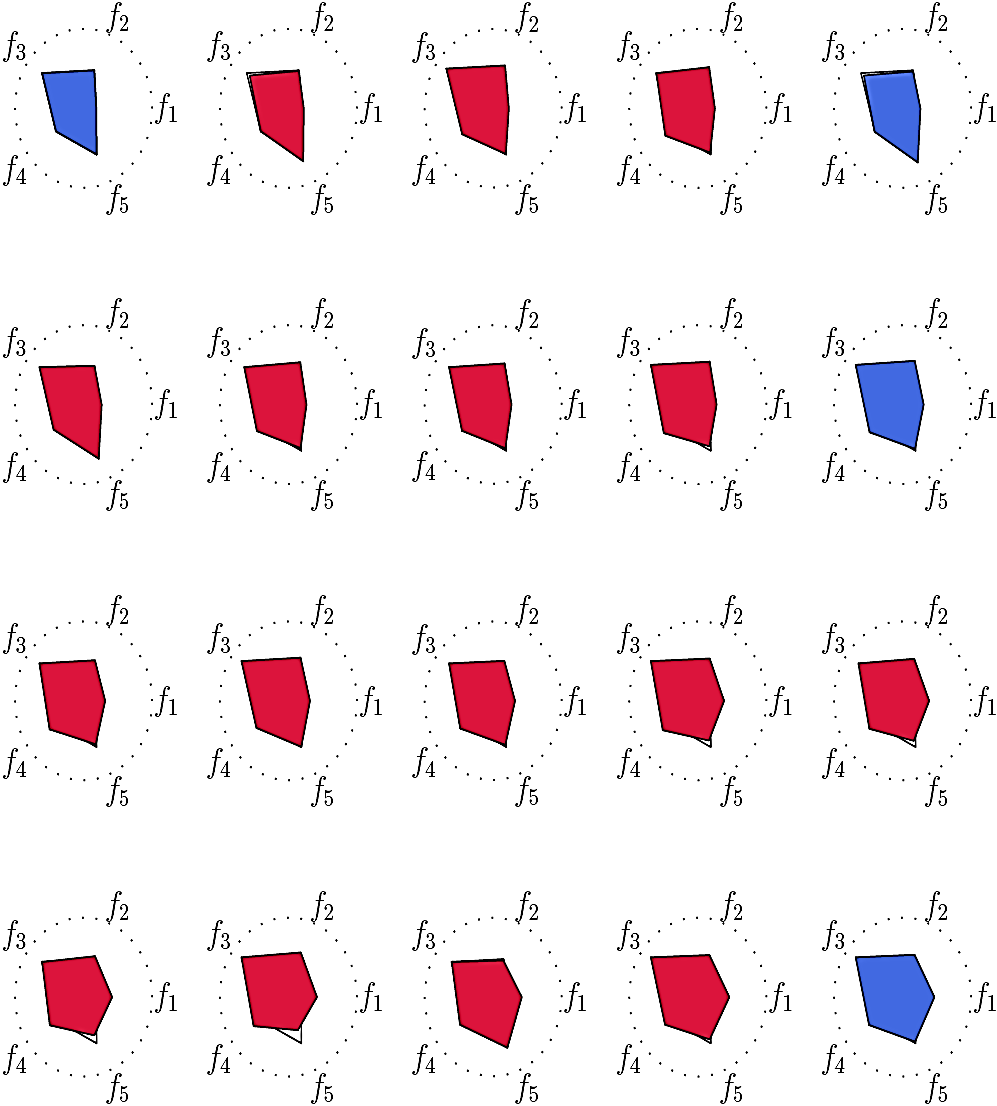
Fig. 5 Representación con la gráfica de radar del resultado del segundo método de ajuste. Las soluciones se muestran desde x0 en la esquina superior izquierda hasta x20 en la esquina inferior derecha

Tabla 3 Valores seleccionados de las funciones objetivo para el segundo escenario
| Punto | f1 | f2 | f3 | f4 | f5 |
|---|---|---|---|---|---|
| F(x5) | 2689.8 | 405480 | 15 | 0.359921 | 72.5 |
| F(x10) | 2291.9 | 387780 | 14 | 0.36190 | 81.1 |
| F(x20) | 1737.0 | 398880 | 15 | 0.400363 | 78.7 |
Se puede notar que los saltos en el espacio objetivo para este método no son tan suaves como los obtenidos para el caso del enfoque de cambio en el espacio objetivo. Esto se debe probablemente al hecho de que no existe una relación directa entre los pesos y el control de tamaño de paso. Sin embargo, el uso de ∈, ayuda a preservar una cierta distancia. De acuerdo con los resultados, la distancia máxima entre dos soluciones consecutivas fue de 9540, mientras que la mínima fue de 900, i.e., se tiene una diferencia de un orden de magnitud. No obstante, el método elegido puede ser útil en el proceso de toma de decisiones ya que presenta una serie de soluciones candidato a lo largo del conjunto de Pareto de acuerdo a la dirección de preferencia dada. Cabe señalar que para este enfoque no es posible presentar una comparación ya que no existe un método suficientemente parecido para este fin.
Se destaca que se ha realizado la demostración en un problema ampliamente estudiado con 5 objetivos. Nótese que en ambos casos se considera la solución de una serie de SOPs y que el número k de los objetivos no tiene una influencia crucial en la complejidad de los problemas. Por lo tanto, los métodos presentados pueden ser, en principio, aplicados a los MaOPs para cualquier número k de objetivos, algo que no es posible con otros métodos; por ejemplo, aquellos que buscan calcular todo el conjunto de soluciones.
Es importante señalar que los métodos de reajuste propuestos en este trabajo pueden de igual forma ser utilizados en problemas continuos. Al utilizar un algoritmo evolutivo para resolver los problemas (9) o (17), según sea el caso, se tiene la posibilidad de extender el dominio de los problemas que pueden resolverse con estos enfoques.
En este trabajo se considera el MaOP continuo DTLZ2 14 únicamente con el fin de ilustrar el funcionamiento general de los métodos discutidos anteriormente. Dicho problema está dado por
donde
y Xk es el vector (xk ,..., xn ) para n > k. En los ejemplos siguientes se utiliza n =15 y k = 10.
Para ejemplo del método de reajuste I se tiene F(x0) = (0.3164,... ,0.3164)T ∈ ℝ10, la dirección d = (1, -1,... ,1,-1)T ∈ ℝ10 y un tamaño de paso t = 0.05. Es decir, partiendo de una solución en la que todos los objetivos valen los mismo, se desea mejorar el valor de las funciones pares sacrificando las funciones impares. Se calcularon 50 iteraciones del algoritmo.
El resultado obtenido se presenta en forma de grafica de radar en la Figura 7a. Se presentan cuatro momentos del método: el inicial, luego de un cuarto del total de las iteraciones, a la mitad del proceso y la iteración final, respectivamente.
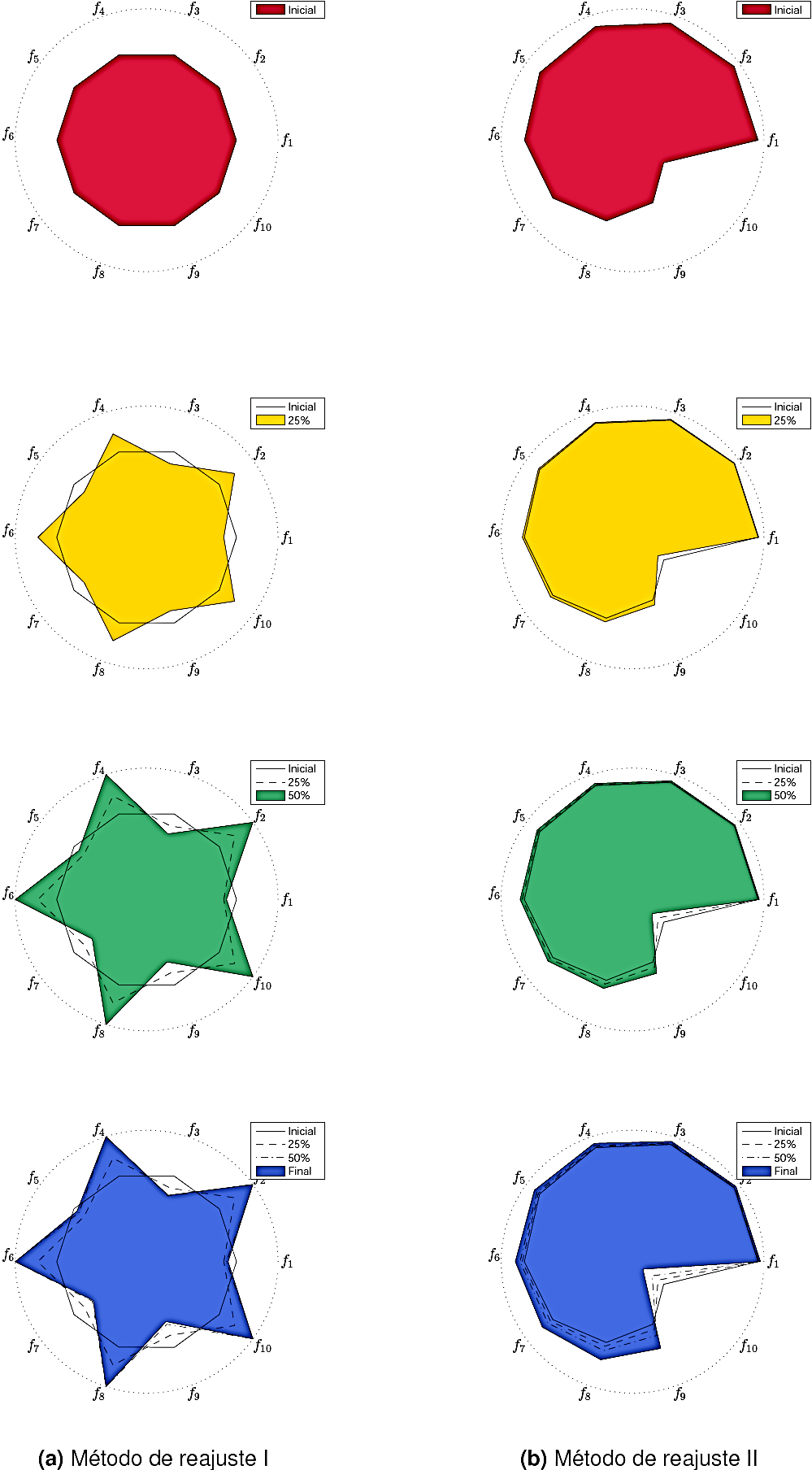
Por otro lado, para el método de reajuste II se considere): x0 = (0.5,... ,0.5)T ∈ ℝ15 como solución óptima inicial, ∆α = (1,1,..., 1, -9,1) ∈ ℝ10 y t = 0.05. En este caso el objetivo es mejorar el valor de todas las funciones a excepción de f9, la función sacrificada.
En este ejemplo se calcularon 22 iteraciones del método antes que el peso asignado a f9 fuera negativo. La gráfica de radar para este ejemplo puede verse en la Figura 7b, se consideran los mismos momentos que en ejemplo anterior.
Se resalta de las instancias para el caso continuo la aplicabilidad de los enfoques propuestos en diferentes dominios. Además, se obtuvieron trayectorias que siguen la dirección propuesta para un problema con 10 objetivos, se consideraron direcciones ilustrativas para este fin.
5. Conclusiones y trabajo futuro
En este trabajo hemos abordado el procesamiento numérico de Problemas de Optimización de Muchos Objetivos (MaOPs) discretos por medio de estrategias evolutivas. Debido a los recientes avances en este campo, los algoritmos evolutivos modernos son capaces de encontrar rápidamente un conjunto de soluciones esparcidas a lo largo del conjunto/frente de Pareto en un determinado MaOP.
Sin embargo, como las magnitudes de los frentes de Pareto pueden ser muy grandes con el incremento del número de objetivos, estos conjuntos ya no se pueden calcular completamente ni ser visualizados de manera eficiente. Por lo tanto, es de esperarse que cierto conjunto S obtenido por un algoritmo evolutivo (o cualquier otro tipo de algoritmo) revele grandes vacíos. Por consecuencia, no se puede esperar que S contenga la solución 'ideal' para el problema dado. En cambio, parece lógico encontrar una solución que se adapte mejor a satisfacer las necesidades de quien toma las decisiones.
En este artículo, se han propuesto dos métodos que son capaces de obtener una secuencia de soluciones partiendo de un punto inicial y siguiendo la trayectoria de una dirección especificada por el usuario. Concretamente, se propuso un método que dirige la búsqueda a lo largo del frente de Pareto acorde a una dirección d dada en el espacio objetivo.
El segundo método utiliza las preferencias del usuario entre los diferentes objetivos para lo cual se ha modificado el método de suma ponderada. Los resultados numéricos, en dos escenarios, de un caso particular del problema de enrutamiento de vehículos con 5 objetivos, así como en un MaOP continuo con 10 objetivos, han demostrado la aplicabilidad del nuevo enfoque.
Aunque, estos primeros resultados son prometedores, todavía hay varias cuestiones que deben abordarse en trabajos futuros. Por ejemplo, uno de ellos sería el considerar aún más características en el movimiento que puedan interesar al tomador de decisiones. Además, la consideración de las comparaciones debe ser fortalecida. Finalmente, se desea atacar ciertos problemas del mundo real con el fin de demostrar la fortaleza de este nuevo enfoque.

